Explicit Contact Optimization in Whole-Body Contact-Rich Manipulation
作者: Victor Leve, João Moura, Namiko Saito, Steve Tonneau, Sethu Vijayakumar
分类: cs.RO
发布日期: 2024-08-28 (更新: 2024-10-15)
期刊: 2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids)
DOI: 10.1109/Humanoids58906.2024.10769591
💡 一句话要点
提出基于连续优化的显式接触模型,解决全身接触操作规划难题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 全身接触操作 连续优化 接触规划 运动规划 机器人操作 显式接触模型
📋 核心要点
- 全身接触操作(WBCRM)因接触模式组合爆炸和接触位置不确定性而难以规划。
- 论文提出一种机器人表面的连续显式表示,将WBCRM建模为分层连续优化问题。
- 实验表明,该方法显著提升了收敛性、规划时间和可行性,无需轨迹优化。
📝 摘要(中文)
人类可以利用身体表面的任何部位进行操作,例如移动大型重物或同时操作多个物体。然而,机器人实现这种全身接触操作(WBCRM)仍然极具挑战性。WBCRM问题不仅维度高,还存在接触模式的组合爆炸问题。此外,允许在身体表面任何位置创建接触增加了复杂性,阻碍了在合理时间内进行操作规划。本文通过将平面WBCRM的接触和运动规划建模为分层连续优化问题来解决这一计算难题。为此,我们提出了一种新颖的机器人表面连续显式表示,我们认为这为未来使用连续优化进行WBCRM的研究奠定了基础。结果表明,与现有方法相比,本文方法在收敛性、规划时间和可行性方面都有显著提高,平均迭代次数减少99%,求解时间减少96%,且无需容易失败的轨迹优化步骤。
🔬 方法详解
问题定义:论文旨在解决机器人全身接触操作(WBCRM)中的规划难题。WBCRM的挑战在于其高维度和接触模式的组合复杂性,特别是当允许机器人身体的任何部位与环境产生接触时,规划空间变得异常庞大。现有的方法通常难以在合理的时间内找到可行的操作方案,或者需要依赖容易失败的轨迹优化步骤。
核心思路:论文的核心思路是将WBCRM问题建模为分层连续优化问题。通过将接触和运动规划解耦,并采用连续优化方法,可以有效地搜索高维空间,避免离散搜索带来的组合爆炸问题。此外,论文还提出了一种新颖的机器人表面连续显式表示,使得接触规划可以在连续空间中进行。
技术框架:整体框架包含以下几个主要阶段:首先,使用连续显式表示对机器人表面进行建模。然后,将WBCRM问题分解为接触规划和运动规划两个子问题。接触规划阶段,通过连续优化方法确定机器人与环境的最佳接触点。运动规划阶段,根据接触规划的结果,生成机器人的运动轨迹。这两个阶段可以迭代进行,直到找到满足约束条件的操作方案。
关键创新:论文最重要的技术创新点在于提出了机器人表面的连续显式表示。传统的接触规划方法通常使用离散的接触点或接触区域,这限制了规划的灵活性和效率。通过使用连续表示,可以更精确地描述机器人与环境之间的接触关系,并允许在连续空间中进行接触优化。这种连续表示为未来使用连续优化方法解决WBCRM问题奠定了基础。
关键设计:论文的关键设计包括:1) 机器人表面的连续显式表示的具体形式,例如使用参数化曲面或隐式函数来描述机器人表面;2) 接触规划阶段的优化目标函数,例如最小化接触力、最大化操作稳定性等;3) 运动规划阶段的约束条件,例如避免碰撞、满足关节力矩限制等;4) 分层优化策略,例如先进行粗略的接触规划,再进行精细的运动规划。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在收敛性、规划时间和可行性方面都有显著提高。与现有方法相比,平均迭代次数减少99%,求解时间减少96%,且无需容易失败的轨迹优化步骤。这些数据表明,该方法能够有效地解决WBCRM问题,并为机器人全身接触操作提供了新的解决方案。
🎯 应用场景
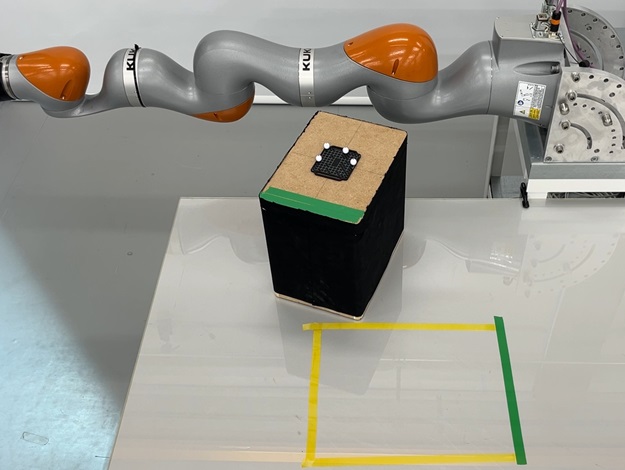
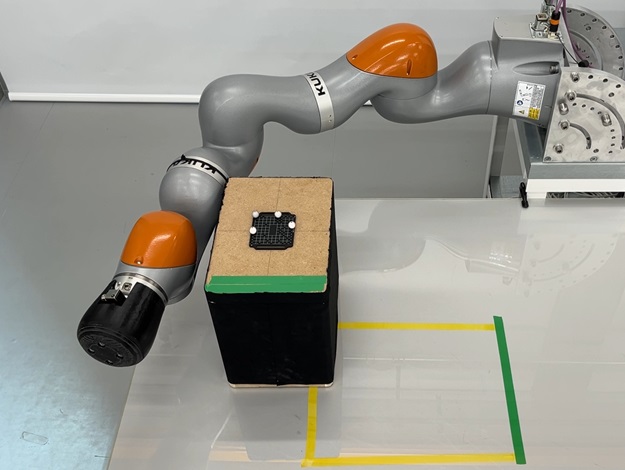
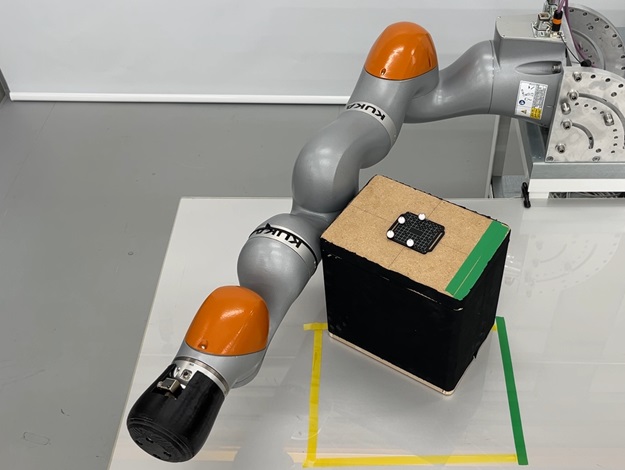
该研究成果可应用于复杂环境下的机器人操作,例如在拥挤的仓库中搬运货物、在狭窄空间内进行维修作业、以及在灾难救援中操作大型物体。通过利用全身接触,机器人可以完成传统方法难以实现的操作任务,提高操作效率和安全性,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Humans can exploit contacts anywhere on their body surface to manipulate large and heavy items, objects normally out of reach or multiple objects at once. However, such manipulation through contacts using the whole surface of the body remains extremely challenging to achieve on robots. This can be labelled as Whole-Body Contact-Rich Manipulation (WBCRM) problem. In addition to the high-dimensionality of the Contact-Rich Manipulation problem due to the combinatorics of contact modes, admitting contact creation anywhere on the body surface adds complexity, which hinders planning of manipulation within a reasonable time. We address this computational problem by formulating the contact and motion planning of planar WBCRM as hierarchical continuous optimization problems. To enable this formulation, we propose a novel continuous explicit representation of the robot surface, that we believe to be foundational for future research using continuous optimization for WBCRM. Our results demonstrate a significant improvement of convergence, planning time and feasibility - with, on the average, 99% less iterations and 96% reduction in time to find a solution over considered scenarios, without recourse to prone-to-failure trajectory refinement steps.