Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars
作者: Zhihao Lin, Zhen Tian, Qi Zhang, Hanyang Zhuang, Jianglin Lan
分类: cs.RO, eess.SY
发布日期: 2024-08-21
备注: 16 pages; Submitted to a journal
💡 一句话要点
针对轻量级自动驾驶车辆,提出增强视觉SLAM的无碰撞驾驶方案
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 视觉SLAM 自动驾驶 避障 路径规划 ORBSLAM3 光流 CLF-CBF-QP
📋 核心要点
- 现有轻量级自动驾驶车辆在CPU算力下,难以实现精确的视觉SLAM和可靠的避障。
- 提出结合光流增强的ORBSLAM3进行位姿估计和纹理提取,并结合CLF-CBF-QP进行安全路径规划。
- 在Gazebo仿真环境中,验证了该方法在复杂室内环境下的有效性和鲁棒性,优于基准算法。
📝 摘要(中文)
本文提出了一种基于视觉的避障策略,用于轻量级自动驾驶车辆,该策略仅使用单个RGB-D相机,即可在纯CPU设备上运行。该方法包括视觉感知和路径规划两个步骤。在视觉感知部分,我们使用ORBSLAM3,并结合光流增强,以估计车辆的位姿并提取场景中丰富的纹理信息。在路径规划阶段,我们采用了一种结合控制李雅普诺夫函数和控制障碍函数(CLF-CBF-QP)的方法,以及障碍物形状重建过程(SRP),以规划安全稳定的轨迹。为了验证所提出方法的性能和鲁棒性,我们在Gazebo仿真环境中使用车辆在各种复杂的室内环境中进行了仿真实验。结果表明,我们的方法可以有效地避开场景中的障碍物,并且在多个模拟场景中,与基准算法相比,所提出的算法在实现更稳定和更短的轨迹方面表现更优。
🔬 方法详解
问题定义:论文旨在解决轻量级自动驾驶车辆在计算资源有限的情况下,如何仅使用RGB-D相机实现可靠的视觉SLAM和安全避障的问题。现有方法在CPU上运行时,通常难以兼顾SLAM的精度和避障的实时性,尤其是在复杂环境中,容易出现定位漂移或碰撞风险。
核心思路:论文的核心思路是将视觉SLAM与控制理论相结合,利用增强的ORBSLAM3提供精确的位姿估计和环境感知,然后利用CLF-CBF-QP框架进行安全路径规划。通过光流增强ORBSLAM3,可以提高在纹理较弱区域的定位精度。CLF-CBF-QP框架能够保证轨迹的稳定性和安全性,避免碰撞。
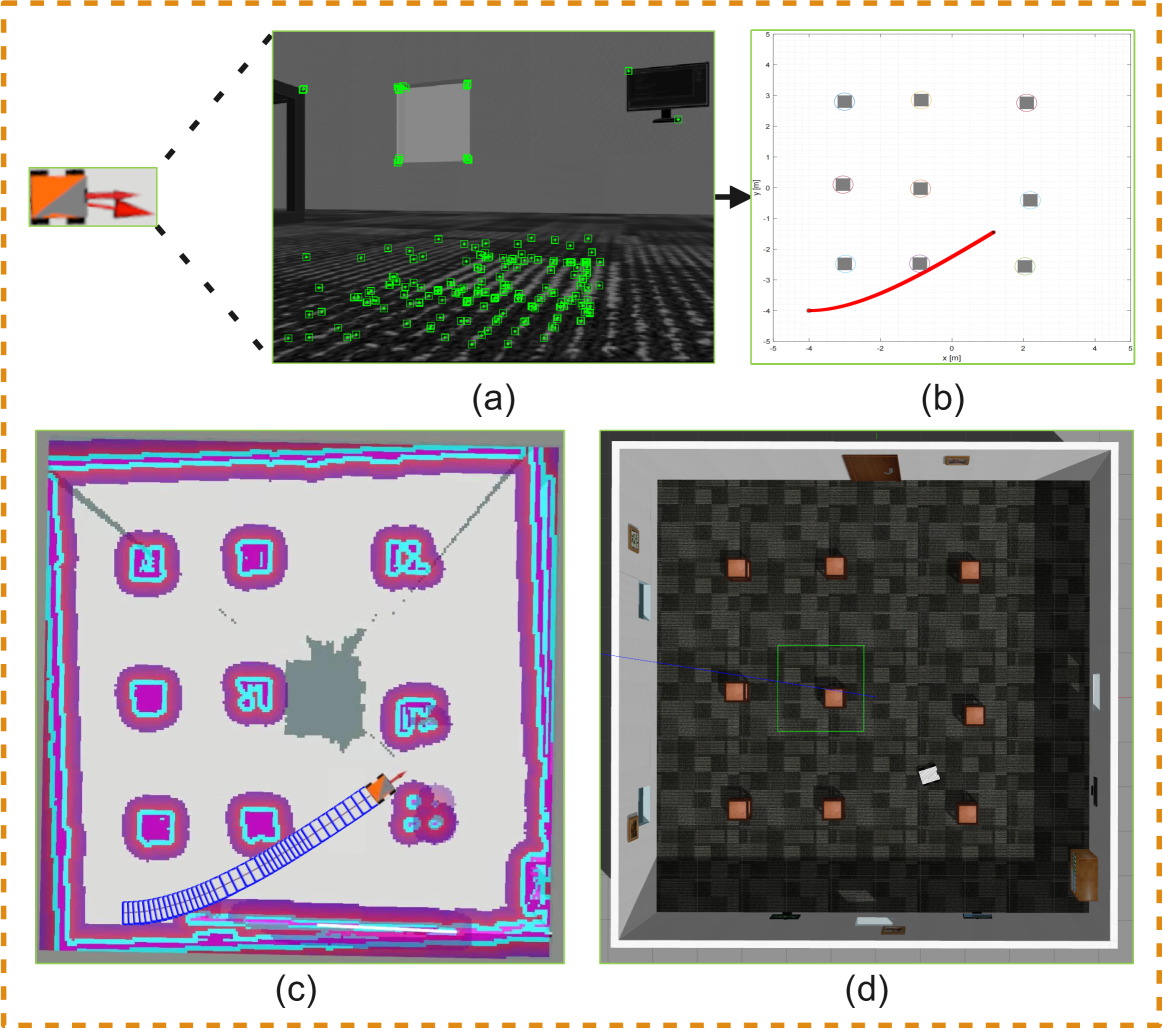
技术框架:该方法主要包含两个阶段:视觉感知和路径规划。视觉感知阶段使用RGB-D相机获取图像,并利用光流增强的ORBSLAM3进行位姿估计和环境地图构建。路径规划阶段首先进行障碍物形状重建(SRP),然后使用CLF-CBF-QP框架生成安全稳定的轨迹。车辆根据规划的轨迹进行运动控制。
关键创新:该方法的关键创新在于将光流增强的ORBSLAM3与CLF-CBF-QP框架相结合,实现了在计算资源有限的情况下,轻量级自动驾驶车辆的安全避障。光流增强提高了ORBSLAM3在纹理缺失区域的鲁棒性,CLF-CBF-QP框架保证了轨迹的安全性和稳定性。
关键设计:在ORBSLAM3中,光流用于补充特征点匹配,尤其是在纹理较弱的区域。CLF-CBF-QP框架中的CLF用于保证车辆的稳定性,CBF用于避免碰撞。障碍物形状重建过程(SRP)用于将点云数据转换为可用于CLF-CBF-QP框架的障碍物表示。具体参数设置和损失函数细节未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在Gazebo仿真环境中能够有效地避开障碍物,并生成更稳定和更短的轨迹。与基准算法相比,该方法在多个模拟场景中表现更优,证明了其在复杂环境下的鲁棒性和有效性。具体的性能数据和提升幅度未知。
🎯 应用场景
该研究成果可应用于低成本、低功耗的自动驾驶车辆,例如室内服务机器人、小型无人车等。在仓储物流、智能家居、安防巡检等领域具有广泛的应用前景。该方法能够在计算资源受限的环境下实现安全可靠的自主导航,降低了自动驾驶技术的应用门槛。
📄 摘要(原文)
The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera. The method consists of two steps: visual perception and path planning. The visual perception part uses ORBSLAM3 enhanced with optical flow to estimate the car's poses and extract rich texture information from the scene. In the path planning phase, we employ a method combining a control Lyapunov function and control barrier function in the form of quadratic program (CLF-CBF-QP) together with an obstacle shape reconstruction process (SRP) to plan safe and stable trajectories. To validate the performance and robustness of the proposed method, simulation experiments were conducted with a car in various complex indoor environments using the Gazebo simulation environment. Our method can effectively avoid obstacles in the scenes. The proposed algorithm outperforms benchmark algorithms in achieving more stable and shorter trajectories across multiple simulated scenes.