A Survey of Embodied Learning for Object-Centric Robotic Manipulation
作者: Ying Zheng, Lei Yao, Yuejiao Su, Yi Zhang, Yi Wang, Sicheng Zhao, Yiyi Zhang, Lap-Pui Chau
分类: cs.RO, cs.AI, cs.CV, cs.LG
发布日期: 2024-08-21
期刊: Machine Intelligence Research 2025
DOI: 10.1007/s11633-025-1542-8
🔗 代码/项目: GITHUB
💡 一句话要点
综述:面向对象中心机器人操作的具身学习研究进展
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身学习 机器人操作 对象中心 强化学习 模仿学习 感知学习 策略学习
📋 核心要点
- 现有机器人操作方法依赖大量数据或预编程,难以适应复杂环境和新物体,限制了其泛化能力。
- 具身学习通过机器人与环境的交互,利用感知反馈进行学习,更适合解决机器人操作中的泛化问题。
- 该综述对具身学习在对象中心机器人操作中的应用进行分类总结,并探讨了未来研究方向和挑战。
📝 摘要(中文)
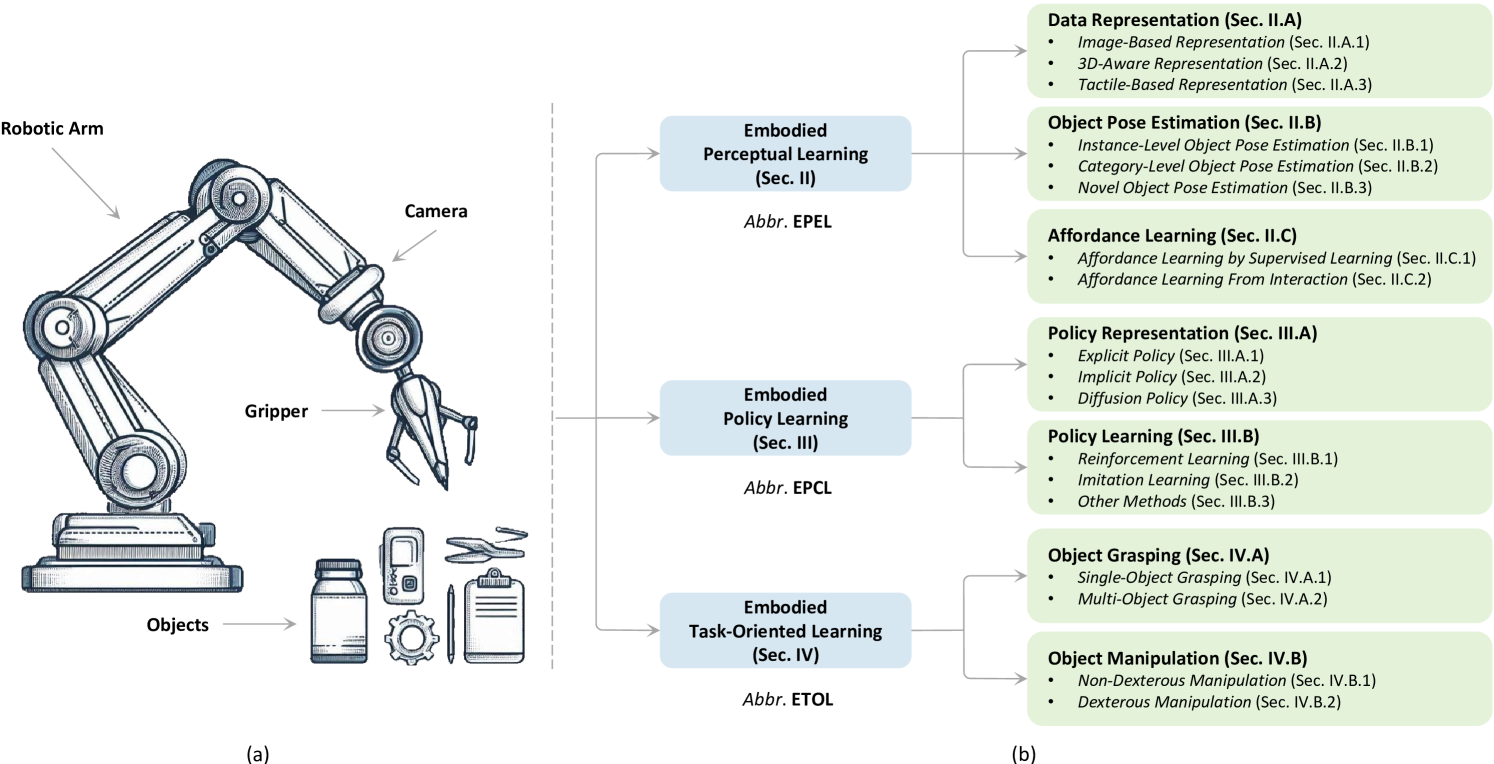
面向对象中心机器人操作的具身学习是具身人工智能中一个快速发展且具有挑战性的领域。它对于推进下一代智能机器人至关重要,并且最近引起了人们的极大兴趣。与数据驱动的机器学习方法不同,具身学习侧重于机器人通过与环境的物理交互和感知反馈进行学习,这使其特别适合于机器人操作。在本文中,我们对该领域的最新进展进行了全面的综述,并将现有工作分为三个主要分支:1)具身感知学习,旨在通过各种数据表示来预测物体姿态和可供性;2)具身策略学习,侧重于使用强化学习和模仿学习等方法生成最佳机器人决策;3)具身任务导向学习,旨在根据物体抓取和操作中不同任务的特征来优化机器人的性能。此外,我们还概述和讨论了公共数据集、评估指标、代表性应用、当前挑战和潜在的未来研究方向。与本调查相关的项目已在https://github.com/RayYoh/OCRM_survey上建立。
🔬 方法详解
问题定义:现有机器人操作方法在处理复杂环境和新物体时面临泛化性挑战。传统方法依赖大量数据或预编程规则,难以适应真实世界的多变性。痛点在于如何让机器人通过自主探索和交互,高效学习操作技能,并具备良好的泛化能力。
核心思路:论文的核心思路是围绕具身学习展开,即让机器人通过与环境的物理交互和感知反馈来学习。这种方法强调机器人自身的经验积累,而非仅仅依赖外部数据。通过感知、策略和任务导向三个方面的学习,使机器人能够更好地理解和操作物体。
技术框架:该综述将具身学习在对象中心机器人操作中的应用分为三个主要分支:1) 具身感知学习,关注物体姿态和可供性的预测;2) 具身策略学习,侧重于生成最优的机器人决策;3) 具身任务导向学习,旨在优化特定任务下的机器人性能。每个分支都包含不同的方法和技术,例如深度学习、强化学习、模仿学习等。
关键创新:该综述的关键创新在于对现有研究进行了系统性的分类和总结,并指出了该领域未来的发展方向。它将具身学习分解为感知、策略和任务三个层面,有助于研究人员更好地理解和解决机器人操作中的问题。此外,该综述还强调了数据集、评估指标和实际应用的重要性。
关键设计:综述本身不涉及具体算法设计,而是对现有算法进行分类和总结。关键设计体现在被综述的各个算法中,例如,在具身感知学习中,可能涉及特定的网络结构用于姿态估计;在具身策略学习中,可能涉及特定的奖励函数设计以引导机器人学习最优策略;在具身任务导向学习中,可能涉及特定的任务分解策略以简化学习过程。
🖼️ 关键图片


📊 实验亮点
该综述总结了具身学习在对象中心机器人操作领域的最新进展,并对现有方法进行了分类和比较。它强调了感知、策略和任务导向学习的重要性,并指出了该领域未来的研究方向。通过github项目,方便研究者快速了解该领域。
🎯 应用场景
该研究对智能制造、家庭服务机器人、医疗机器人等领域具有重要应用价值。通过具身学习,机器人能够更好地适应复杂环境,完成精细操作任务,提高生产效率和服务质量。未来,随着具身学习技术的不断发展,机器人将在更多领域发挥重要作用。
📄 摘要(原文)
Embodied learning for object-centric robotic manipulation is a rapidly developing and challenging area in embodied AI. It is crucial for advancing next-generation intelligent robots and has garnered significant interest recently. Unlike data-driven machine learning methods, embodied learning focuses on robot learning through physical interaction with the environment and perceptual feedback, making it especially suitable for robotic manipulation. In this paper, we provide a comprehensive survey of the latest advancements in this field and categorize the existing work into three main branches: 1) Embodied perceptual learning, which aims to predict object pose and affordance through various data representations; 2) Embodied policy learning, which focuses on generating optimal robotic decisions using methods such as reinforcement learning and imitation learning; 3) Embodied task-oriented learning, designed to optimize the robot's performance based on the characteristics of different tasks in object grasping and manipulation. In addition, we offer an overview and discussion of public datasets, evaluation metrics, representative applications, current challenges, and potential future research directions. A project associated with this survey has been established at https://github.com/RayYoh/OCRM_survey.