ContactSDF: Signed Distance Functions as Multi-Contact Models for Dexterous Manipulation
作者: Wen Yang, Wanxin Jin
分类: cs.RO
发布日期: 2024-08-18 (更新: 2025-03-19)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
ContactSDF:提出基于SDF的多接触模型,用于灵巧操作中的碰撞检测和运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 灵巧操作 有符号距离函数 多接触模型 碰撞检测 时间步进 模型学习 机器人控制
📋 核心要点
- 现有方法在处理灵巧操作中的多接触问题时,往往面临建模复杂、计算量大等挑战,难以实现实时的模型学习和控制。
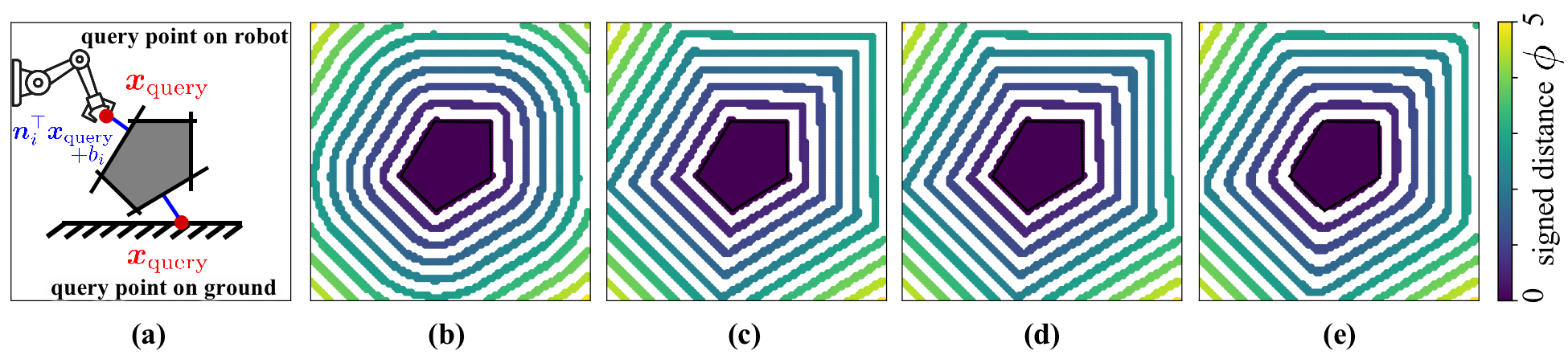
- ContactSDF的核心思想是利用有符号距离函数(SDF)来表示多接触模型,通过两个SDF分别处理碰撞检测和时间步进预测。
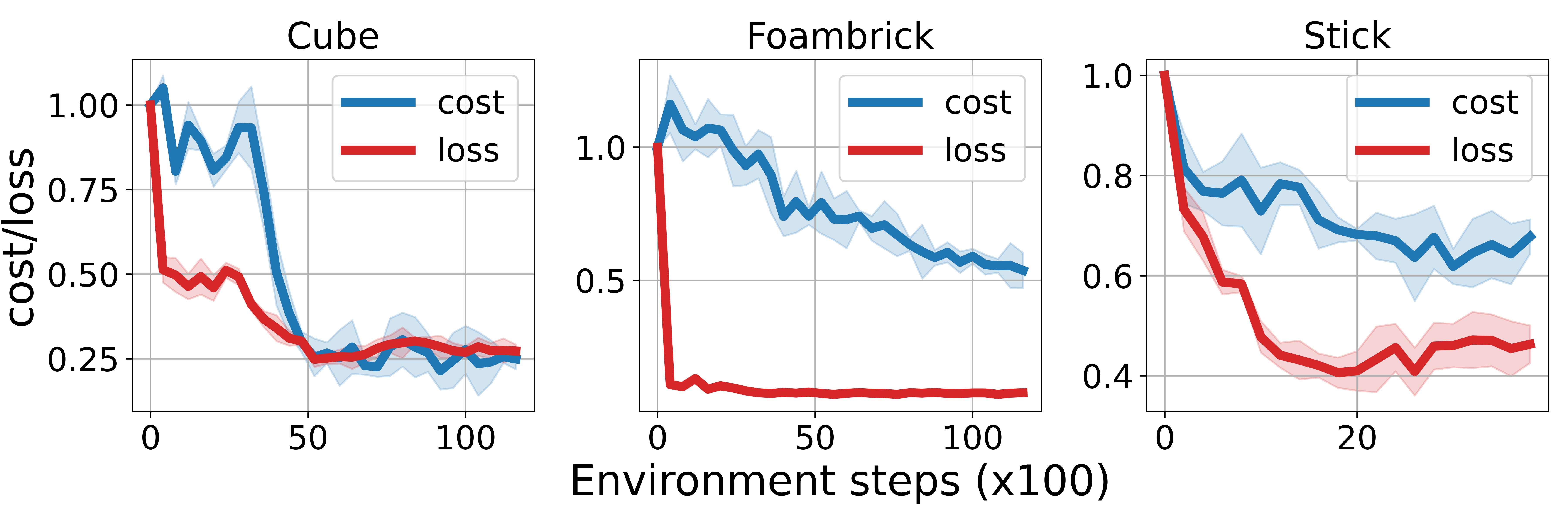
- 实验结果表明,ContactSDF在仿真和真实机械手上均表现出良好的性能,能够在短时间内学习并实现高频率的灵巧操作控制。
📝 摘要(中文)
本文提出了一种名为ContactSDF的方法,该方法使用有符号距离函数(SDF)来近似多接触模型,包括碰撞检测和时间步进例程。ContactSDF首先利用物体的支撑平面表示建立一个SDF,用于碰撞检测;然后,利用生成的接触对偶锥构建第二个SDF,用于预测下一步的时间步进状态。这两个SDF创建了一个可微的闭式多接触动力学模型,用于状态预测,从而能够对富含接触的操作进行高效的模型学习和优化。我们进行了大量的仿真实验,以证明ContactSDF在模型学习和灵巧操作实时控制方面的有效性。我们还在Allegro机械手上评估了ContactSDF在掌上重定向任务中的性能。结果表明,在硬件上进行约2分钟的学习后,ContactSDF能够以30-60Hz的频率实现高质量的灵巧操作。
🔬 方法详解
问题定义:灵巧操作任务中,准确建模物体与操作手之间的多点接触是关键。传统方法通常依赖于复杂的几何计算或离散的接触模型,计算量大,难以进行高效的模型学习和优化,尤其是在需要实时控制的场景下。现有方法难以兼顾精度和效率,限制了灵巧操作在实际场景中的应用。
核心思路:ContactSDF的核心思路是利用有符号距离函数(SDF)来隐式地表示物体的几何形状和接触状态。SDF能够提供物体表面到空间中任意一点的距离和方向信息,从而可以方便地进行碰撞检测和接触力计算。通过构建两个SDF,分别用于碰撞检测和时间步进预测,可以实现对多接触动力学模型的近似。
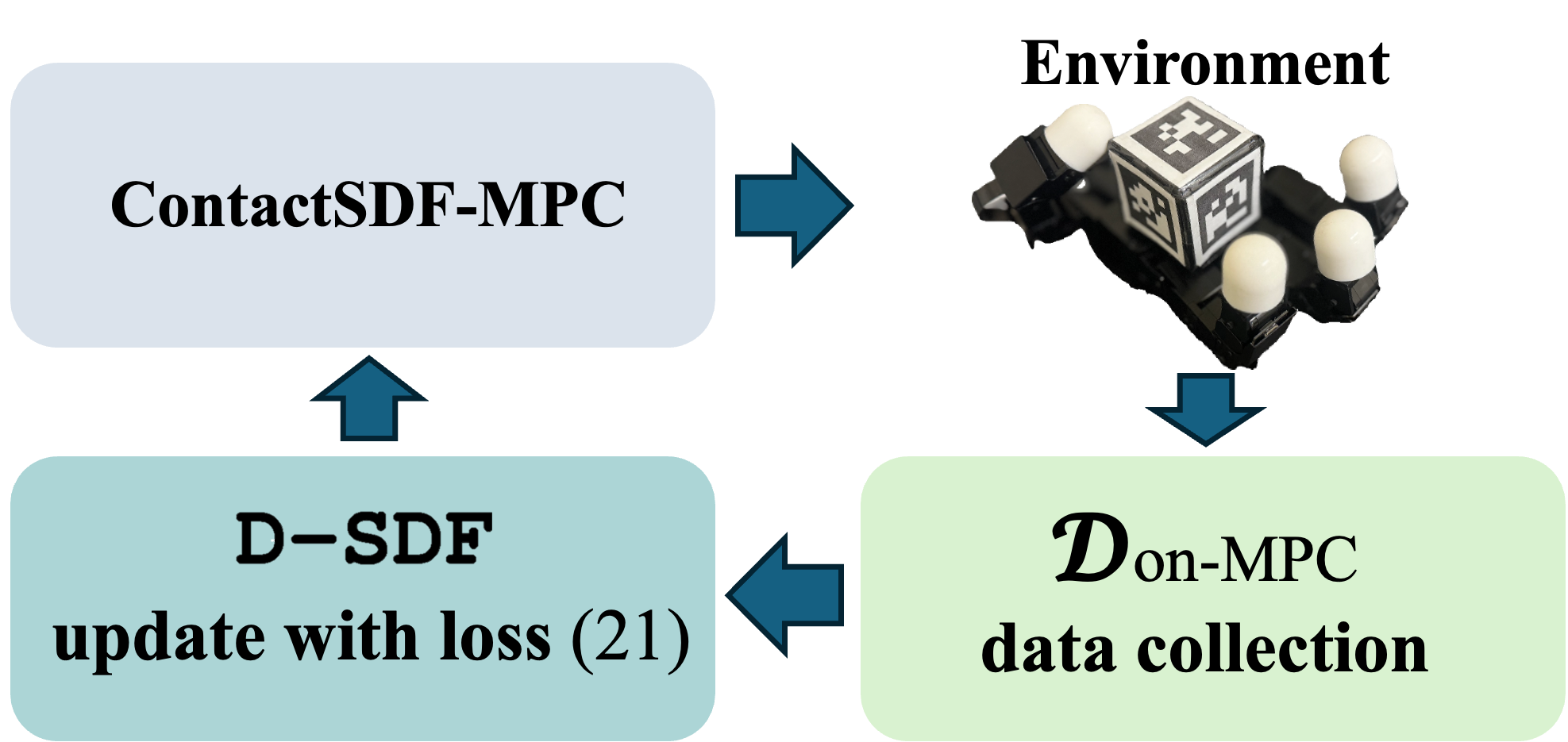
技术框架:ContactSDF的整体框架包含以下几个主要阶段:1) 使用物体的支撑平面表示构建第一个SDF,用于碰撞检测;2) 基于碰撞检测结果,生成接触对偶锥;3) 利用接触对偶锥构建第二个SDF,用于时间步进预测;4) 将两个SDF结合,形成一个可微的闭式多接触动力学模型,用于状态预测和控制。
关键创新:ContactSDF的关键创新在于使用SDF来表示多接触模型,并利用接触对偶锥来构建时间步进预测的SDF。这种方法将复杂的接触动力学问题转化为SDF的优化问题,从而可以利用高效的优化算法进行模型学习和控制。与传统的基于几何计算或离散接触模型的方法相比,ContactSDF具有更高的计算效率和更好的可微性。
关键设计:ContactSDF的关键设计包括:1) 使用支撑平面表示来构建初始的SDF;2) 利用接触对偶锥来表示接触力的可行方向;3) 设计合适的损失函数,用于优化SDF的参数,例如,可以使用预测状态与真实状态之间的差异作为损失函数。具体的网络结构未知,但推测使用了能够表达SDF的神经网络结构,例如SIREN。
🖼️ 关键图片
📊 实验亮点
ContactSDF在仿真实验中表现出良好的性能,能够准确地预测物体的运动状态。在Allegro机械手上进行的掌上重定向任务中,经过约2分钟的硬件学习,ContactSDF能够以30-60Hz的频率实现高质量的灵巧操作。这些结果表明,ContactSDF具有很强的实用价值。
🎯 应用场景
ContactSDF具有广泛的应用前景,例如:工业机器人中的装配、抓取和操作任务;医疗机器人中的微创手术;以及人机协作中的安全控制。该方法能够提高机器人操作的精度、效率和鲁棒性,并有望推动灵巧操作技术在实际场景中的应用。
📄 摘要(原文)
In this paper, we propose ContactSDF, a method that uses signed distance functions (SDFs) to approximate multi-contact models, including both collision detection and time-stepping routines. ContactSDF first establishes an SDF using the supporting plane representation of an object for collision detection, and then uses the generated contact dual cones to build a second SDF for time-stepping prediction of the next state. Those two SDFs create a differentiable and closed-form multi-contact dynamic model for state prediction, enabling efficient model learning and optimization for contact-rich manipulation. We perform extensive simulation experiments to show the effectiveness of ContactSDF for model learning and real-time control of dexterous manipulation. We further evaluate the ContactSDF on a hardware Allegro hand for on-palm reorientation tasks. Results show with around 2 minutes of learning on hardware, the ContactSDF achieves high-quality dexterous manipulation at a frequency of 30-60Hz. Project page https://yangwen-1102.github.io/contactsdf.github.io/