Vision-assisted Avocado Harvesting with Aerial Bimanual Manipulation
作者: Zhichao Liu, Jingzong Zhou, Caio Mucchiani, Konstantinos Karydis
分类: cs.RO
发布日期: 2024-08-17
备注: First Two Authors Share Equal Contribution. 13 Pages, 15 Figures
💡 一句话要点
提出一种基于视觉的无人机双臂协同牛油果采摘方案,解决高处果实采摘难题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机 双臂机器人 视觉感知 牛油果采摘 精准农业
📋 核心要点
- 现有地面机器人在牛油果采摘中效率低下,原因是地面不平整、种植结构不规则以及果实位置过高。
- 本文提出一种无人机双臂协同采摘方案,利用视觉感知和学习自主检测、定位并采摘牛油果。
- 实验验证了各组件的有效性,并进行了集成实验,证明了该系统的整体性能。
📝 摘要(中文)
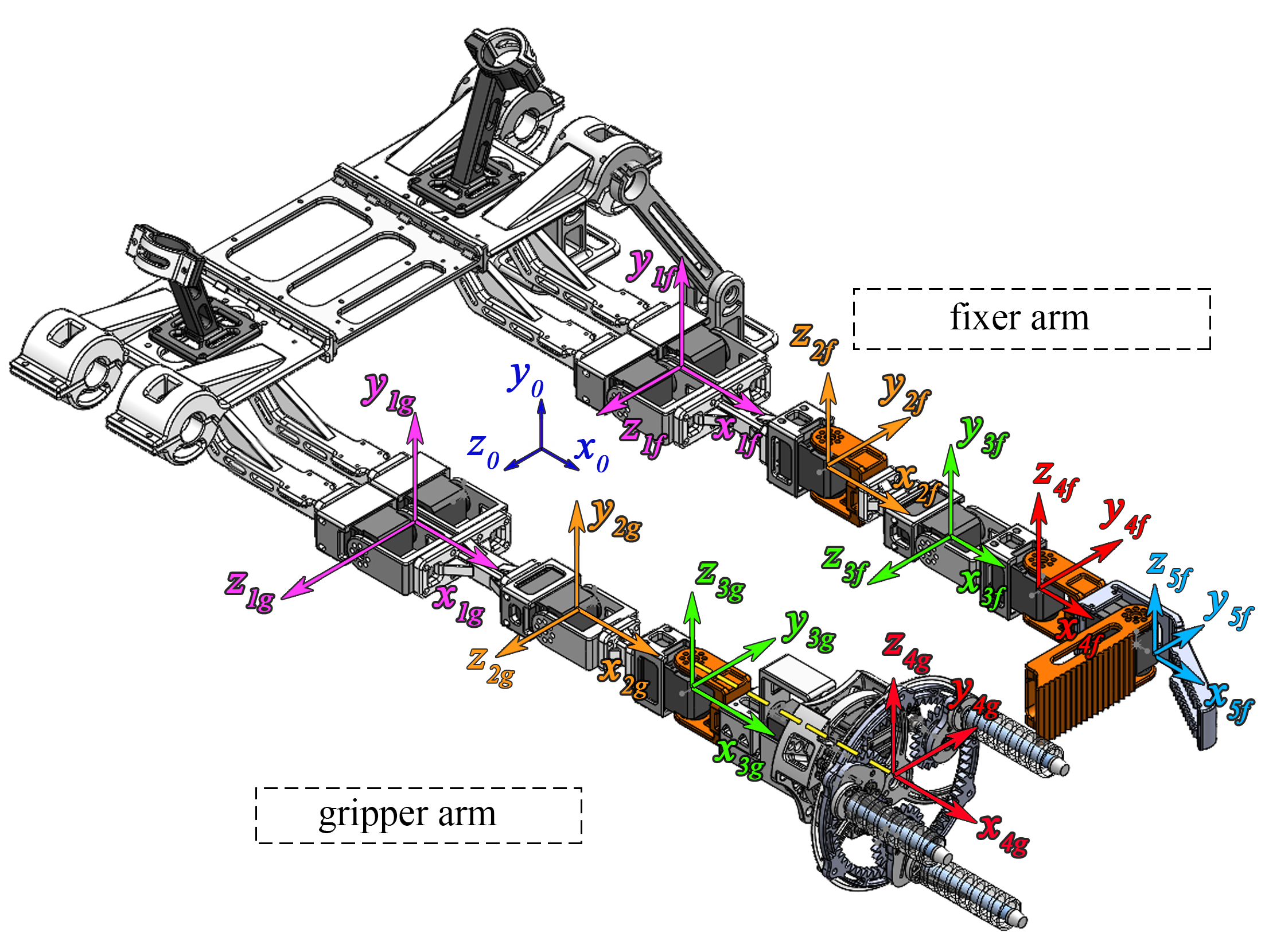
本文提出了一种基于视觉的无人机双臂协同采摘系统,旨在提高牛油果采摘效率。针对地面机器人难以有效采摘的难题,该系统集成了视觉感知和学习技术,实现牛油果的自主检测、定位和采摘。该双臂系统包含一个夹持臂和一个固定臂,解决了牛油果采摘中的关键挑战:旋转运动是分离果实的最有效方式,但果柄可能储存弹性势能,阻碍采摘。固定臂用于稳定果柄,辅助夹持臂完成采摘。集成的视觉感知过程能够检测牛油果并确定其姿态,进而用于确定双臂操作规划器的目标点。通过实验评估了每个组件的有效性,并进行了集成实验以评估系统的整体性能。
🔬 方法详解
问题定义:论文旨在解决牛油果采摘效率低下的问题,尤其是在传统地面机器人难以触及的高处。现有方法的痛点在于,地面机器人受限于地形和树木结构,无法有效采摘高处的牛油果,而人工采摘成本高昂且效率低下。此外,牛油果采摘需要克服果柄的弹性势能,直接拉拽可能导致果实损伤或无法采摘。
核心思路:论文的核心解决思路是利用无人机平台搭载双臂操作机构,结合视觉感知技术,实现对高处牛油果的自主定位和采摘。通过双臂协同,一个手臂负责固定果柄,另一个手臂负责夹持和旋转果实,从而克服果柄的弹性势能,实现高效且无损的采摘。
技术框架:该系统的整体架构包含以下几个主要模块:1) 视觉感知模块:利用摄像头和图像处理算法,检测和识别牛油果,并估计其三维姿态。2) 双臂操作规划模块:根据视觉感知的结果,规划双臂的运动轨迹,确保夹持臂能够准确夹持果实,固定臂能够稳定果柄。3) 双臂控制模块:控制双臂的运动,实现夹持、固定和旋转等操作。4) 无人机平台:提供飞行能力,将双臂操作机构移动到目标位置。
关键创新:该论文最重要的技术创新点在于将视觉感知、双臂协同操作和无人机平台相结合,实现了一种全新的高处果实采摘方案。与传统的地面机器人采摘方案相比,该方案具有更高的灵活性和适应性,能够有效解决高处果实采摘的难题。此外,双臂协同的设计能够克服果柄的弹性势能,提高采摘成功率和果实质量。
关键设计:视觉感知模块可能采用了深度学习方法,例如目标检测网络(如YOLO或SSD)来识别牛油果,并使用姿态估计网络来估计其三维姿态。双臂操作规划模块可能采用了基于优化的运动规划算法,例如RRT或PRM,来生成双臂的运动轨迹。双臂控制模块可能采用了PID控制或力/位混合控制,以实现精确的夹持和旋转操作。具体的参数设置、损失函数和网络结构等技术细节未知,需要参考论文正文。
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了各个组件的有效性,并进行了集成实验,证明了该系统的整体性能。虽然具体的性能数据未知,但实验结果表明,该系统能够有效地检测、定位和采摘牛油果,并且能够克服果柄的弹性势能,提高采摘成功率。与传统的人工采摘相比,该系统具有更高的效率和更低的成本。
🎯 应用场景
该研究成果可应用于精准农业领域,提高牛油果等高处果实的采摘效率,降低人工成本,减少果实损伤。未来,该技术可推广到其他类似农作物的采摘,例如苹果、梨等,并可与其他农业机器人技术相结合,实现农业生产的自动化和智能化。
📄 摘要(原文)
Robotic fruit harvesting holds potential in precision agriculture to improve harvesting efficiency. While ground mobile robots are mostly employed in fruit harvesting, certain crops, like avocado trees, cannot be harvested efficiently from the ground alone. This is because of unstructured ground and planting arrangement and high-to-reach fruits. In such cases, aerial robots integrated with manipulation capabilities can pave new ways in robotic harvesting. This paper outlines the design and implementation of a bimanual UAV that employs visual perception and learning to autonomously detect avocados, reach, and harvest them. The dual-arm system comprises a gripper and a fixer arm, to address a key challenge when harvesting avocados: once grasped, a rotational motion is the most efficient way to detach the avocado from the peduncle; however, the peduncle may store elastic energy preventing the avocado from being harvested. The fixer arm aims to stabilize the peduncle, allowing the gripper arm to harvest. The integrated visual perception process enables the detection of avocados and the determination of their pose; the latter is then used to determine target points for a bimanual manipulation planner. Several experiments are conducted to assess the efficacy of each component, and integrated experiments assess the effectiveness of the system.