Robust Maneuver Planning With Scalable Prediction Horizons: A Move Blocking Approach
作者: Philipp Schitz, Johann C. Dauer, Paolo Mercorelli
分类: cs.RO, eess.SY
发布日期: 2024-08-15
备注: Submitted to L-CSS with CDC option
期刊: IEEE Control Systems Letters, vol. 8, pp. 1907-1912, 2024
DOI: 10.1109/LCSYS.2024.3414971
💡 一句话要点
提出基于Move Blocking的Tube-MPC,实现长时域鲁棒机动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 长时域规划 鲁棒控制 Move Blocking 约束缩减 Tube-MPC 无人系统
📋 核心要点
- 在资源受限硬件上实现长时域MPC面临挑战,尤其是在需要小采样间隔的长距离机动中。
- 论文提出基于Move Blocking的Tube-MPC,通过减少约束数量和有效利用决策输入,提升计算效率。
- 实验表明,该方法在直升机着陆任务中,能显著降低计算时间,同时保持轨迹成本的合理增长。
📝 摘要(中文)
本文提出了一种计算高效的基于Tube的Shrinking Horizon MPC方法,该方法可扩展到长预测时域,从而解决了在计算资源有限的硬件上实施模型预测控制(MPC)的难题。特别是对于需要小采样时间的长距离机动,所需的时域长度限制了其在车载计算机上的应用。通过Move Blocking,我们确保在整个机动过程中有效地利用给定数量的决策输入。此外,还引入了一种大幅减少约束数量的方法。通过直升机在倾斜平台上着陆的实验,验证了该方法,预测时域为300步。约束减少将计算时间减少了一个数量级,而轨迹成本略有增加。
🔬 方法详解
问题定义:论文旨在解决计算资源受限情况下,模型预测控制(MPC)难以应用于长时域机动规划的问题。传统MPC方法在处理长距离、高精度要求的任务时,需要非常长的预测时域和小的采样时间,导致计算量巨大,难以在车载计算机等资源有限的平台上实时运行。现有方法的痛点在于计算复杂度高,难以满足实时性要求。
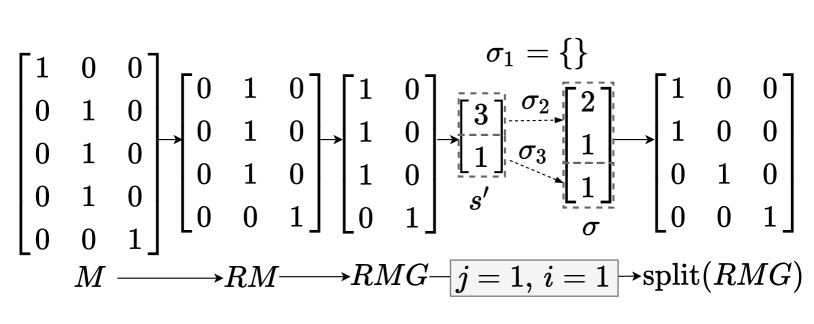
核心思路:论文的核心思路是通过Move Blocking和约束缩减来降低MPC的计算复杂度,使其能够应用于长时域的机动规划。Move Blocking通过将多个控制输入合并为一个决策变量,减少了决策变量的数量。约束缩减则通过减少约束的数量,进一步降低了计算负担。同时,采用Tube-MPC保证了系统的鲁棒性。
技术框架:整体框架是一个Tube-based Shrinking Horizon MPC。首先,利用Move Blocking对控制输入进行分组,减少决策变量的数量。然后,通过约束缩减方法,减少约束的数量。接着,使用Shrinking Horizon MPC进行优化求解,得到控制序列。最后,将控制序列应用于系统,并重复上述过程。
关键创新:论文的关键创新在于将Move Blocking和约束缩减技术结合到Tube-MPC中,从而实现了长时域、鲁棒的机动规划。Move Blocking和约束缩减分别从决策变量和约束两个方面降低了计算复杂度,使得MPC能够应用于计算资源有限的平台。与传统MPC相比,该方法在保证鲁棒性的前提下,显著降低了计算时间。
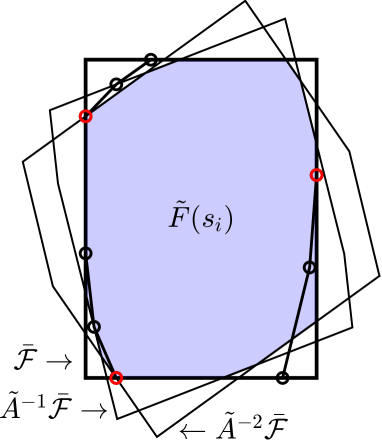
关键设计:Move Blocking的关键参数是Block的大小,即每个决策变量控制的输入数量。Block的大小需要根据具体的任务和系统动态特性进行调整。约束缩减的关键在于选择哪些约束可以被安全地移除,这需要对系统的约束条件进行仔细分析。Tube-MPC的设计需要选择合适的Tube半径,以保证系统的鲁棒性。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在直升机着陆任务中,使用300步的预测时域,约束缩减将计算时间减少了一个数量级,而轨迹成本仅略有增加。这表明该方法能够在显著降低计算复杂度的同时,保持较好的控制性能。该结果验证了该方法在长时域机动规划中的有效性和实用性。
🎯 应用场景
该研究成果可应用于无人机、无人车、机器人等需要在计算资源受限平台上进行长时域、鲁棒机动规划的领域。例如,无人机在复杂环境中进行自主导航、无人车在高速公路上进行自动驾驶、机器人在未知环境中进行路径规划等。该方法能够提高这些系统的自主性和安全性,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Implementation of Model Predictive Control (MPC) on hardware with limited computational resources remains a challenge. Especially for long-distance maneuvers that require small sampling times, the necessary horizon lengths prevent its application on onboard computers. In this paper, we propose a computationally efficient tubebased shrinking horizon MPC that is scalable to long prediction horizons. Using move blocking, we ensure that a given number of decision inputs is efficiently used throughout the maneuver. Next, a method to substantially reduce the number of constraints is introduced. The approach is demonstrated with a helicopter landing on an inclined platform using a prediction horizon of 300 steps. The constraint reduction decreases the computation time by an order of magnitude with a slight increase in trajectory cost.