TacSL: A Library for Visuotactile Sensor Simulation and Learning
作者: Iretiayo Akinola, Jie Xu, Jan Carius, Dieter Fox, Yashraj Narang
分类: cs.RO
发布日期: 2024-08-12 (更新: 2025-03-08)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
TacSL:用于视觉触觉传感器仿真与学习的库,加速触觉策略学习。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 视觉触觉传感器 机器人仿真 强化学习 Sim-to-Real GPU加速 策略学习 接触操作 非对称Actor-Critic
📋 核心要点
- 机器人触觉感知面临传感器信号解释、新场景信号生成以及策略学习三大挑战,现有方法在视觉触觉传感器仿真方面成本高昂。
- TacSL库通过GPU加速视觉触觉传感器仿真,提供传感器模型、训练环境和在线/离线算法,支持高效的sim-to-real策略学习。
- 实验表明,TacSL能够加速触觉图像生成和接触力提取,并结合AACD算法,有效提升接触操作任务的sim-to-real迁移性能。
📝 摘要(中文)
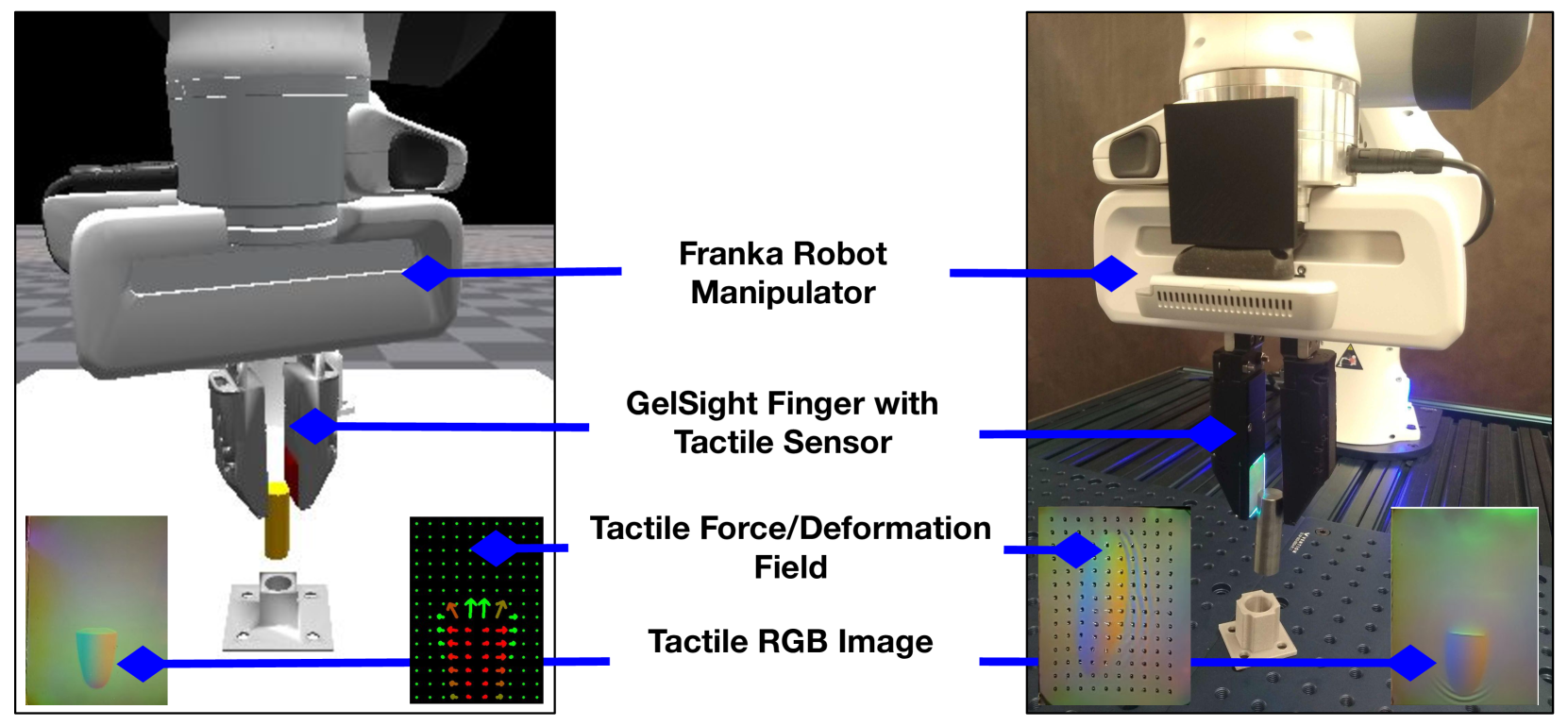
触觉感知对于人类和机器人执行接触丰富的操作任务至关重要。机器人触觉感知面临三大挑战:1) 解释传感器信号;2) 在新场景中生成传感器信号;3) 学习基于传感器的策略。对于视觉触觉传感器,解释受益于其与视觉传感器(如RGB相机)的紧密联系。然而,生成仍然困难,因为视觉触觉传感器通常涉及接触、变形、光照和成像,这些模拟成本高昂;反过来,策略学习也具有挑战性,因为无法利用仿真进行大规模数据收集。我们提出了TacSL(taxel),一个基于GPU的视觉触觉传感器仿真和学习库。TacSL可用于模拟视觉触觉图像,并提取接触力分布,速度比现有技术快200倍以上,所有这些都在广泛使用的Isaac Simulator中完成。此外,TacSL提供了一个学习工具包,包含多个传感器模型、接触密集型训练环境以及在线/离线算法,可以促进sim-to-real应用的策略学习。在算法方面,我们引入了一种名为非对称Actor-Critic蒸馏(AACD)的新型在线强化学习算法,旨在有效且高效地学习仿真中基于触觉的策略,并可以转移到现实世界。最后,我们通过评估蒸馏和多模态传感对于接触丰富的操作任务的益处,并最关键地执行sim-to-real转移,来证明我们的库和算法的效用。
🔬 方法详解
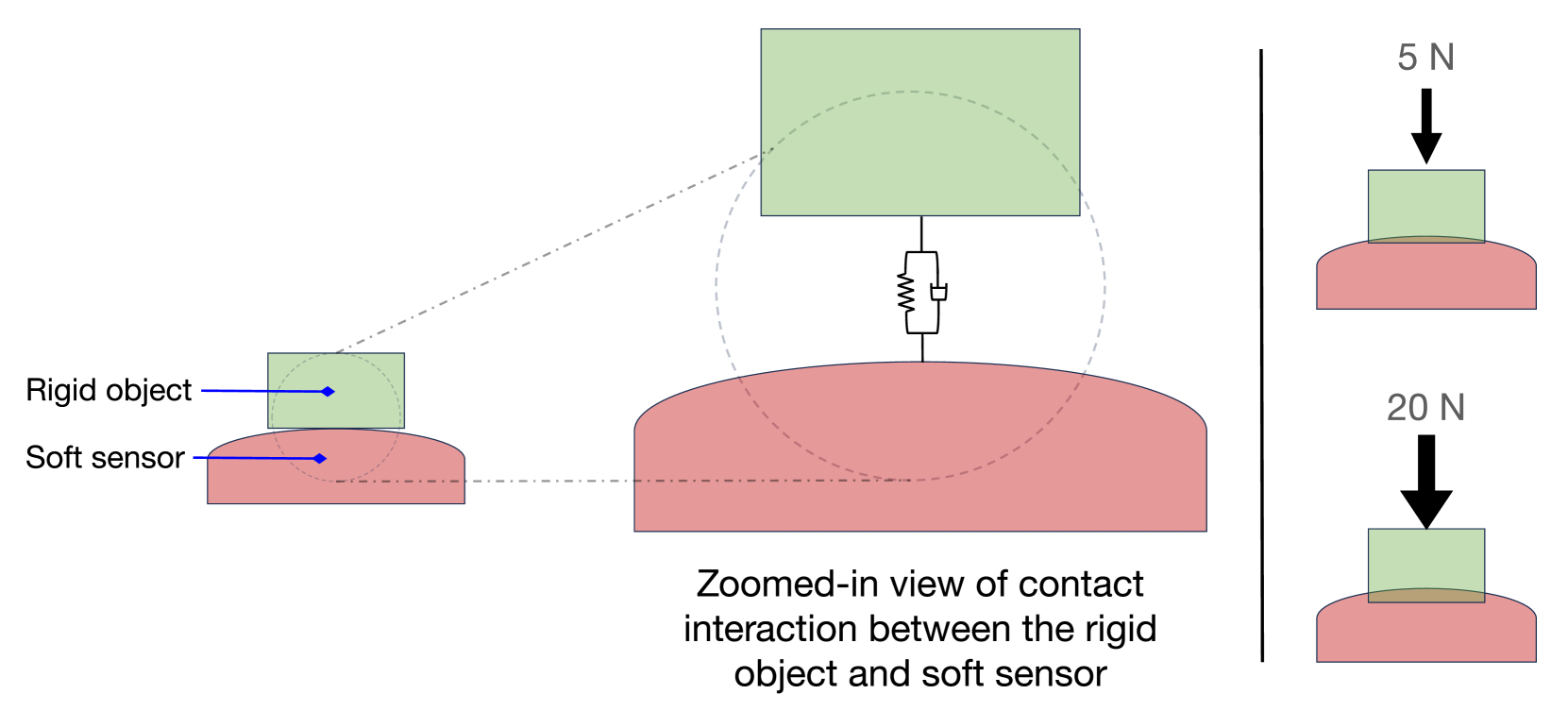
问题定义:现有的视觉触觉传感器仿真方法计算成本高昂,难以生成大规模训练数据,阻碍了基于触觉的机器人策略学习,特别是sim-to-real的迁移学习。痛点在于难以高效地模拟复杂的接触、变形、光照和成像过程。
核心思路:TacSL的核心思路是利用GPU并行计算能力,加速视觉触觉传感器的仿真过程,从而能够生成大量训练数据。此外,TacSL还提供了一套完整的学习工具包,包括多种传感器模型和接触密集型训练环境,并提出了一种新的在线强化学习算法AACD,以提高sim-to-real的迁移性能。
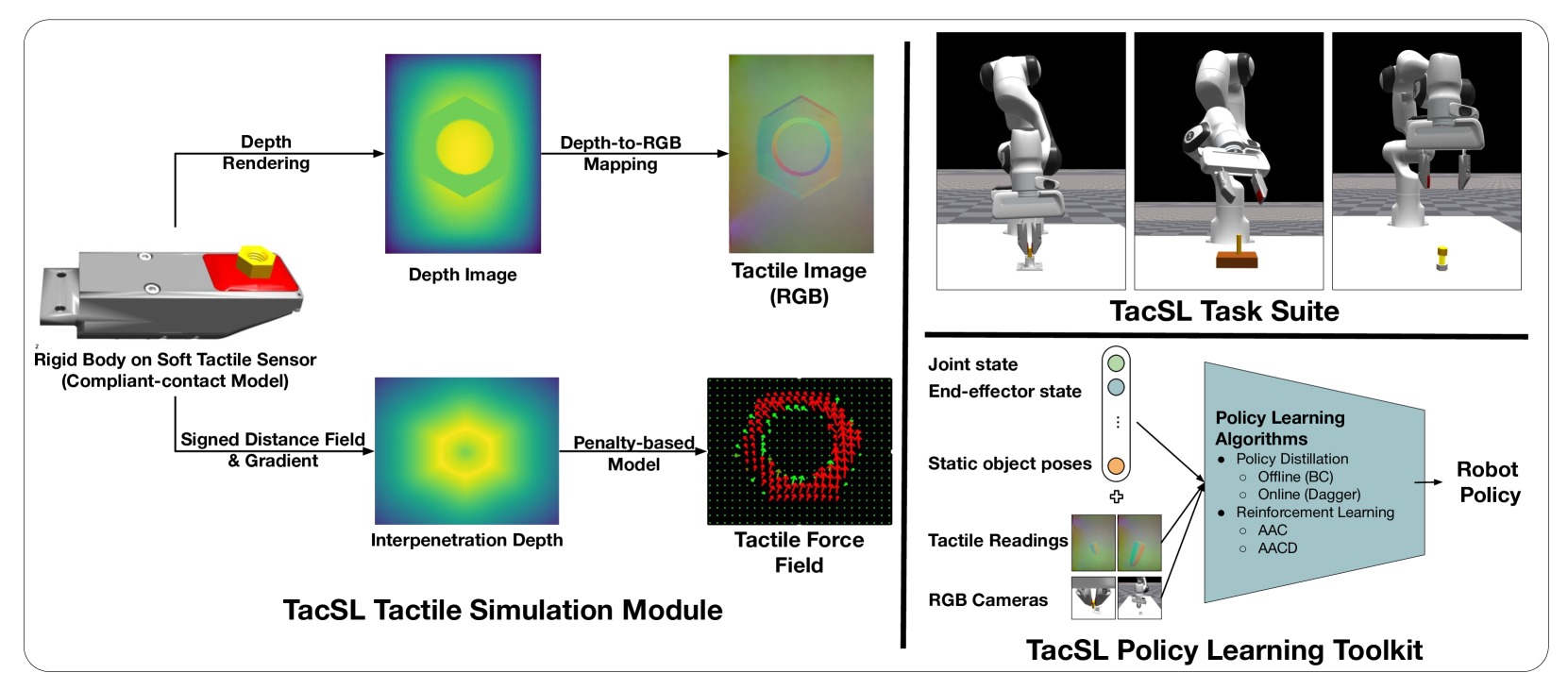
技术框架:TacSL的整体框架包含三个主要部分:1) 基于GPU的视觉触觉传感器仿真器,用于快速生成视觉触觉图像和接触力分布;2) 学习工具包,包含多种传感器模型、接触密集型训练环境以及在线/离线算法;3) AACD算法,用于在仿真环境中学习基于触觉的策略,并将其迁移到真实世界。
关键创新:TacSL最重要的技术创新点在于其GPU加速的视觉触觉传感器仿真器,能够以远超现有方法的速度生成高质量的仿真数据。此外,AACD算法通过非对称的actor-critic结构和蒸馏学习,提高了策略学习的效率和sim-to-real的泛化能力。与现有方法相比,TacSL能够更高效地利用仿真数据进行策略学习,并实现更好的sim-to-real迁移效果。
关键设计:TacSL的GPU加速仿真器利用CUDA等技术,将复杂的物理计算任务并行化,从而显著提高了仿真速度。AACD算法的关键设计包括:1) 非对称的actor和critic网络结构,其中actor网络负责生成策略,critic网络负责评估策略;2) 蒸馏学习,将仿真环境中学到的策略知识迁移到真实世界;3) 在线强化学习,允许agent在与环境交互的过程中不断学习和改进策略。
🖼️ 关键图片
📊 实验亮点
TacSL能够以超过现有技术200倍的速度模拟视觉触觉图像并提取接触力分布。通过在Isaac Simulator中集成TacSL和AACD算法,在接触丰富的操作任务中实现了有效的sim-to-real迁移。实验结果表明,蒸馏学习和多模态传感能够显著提升机器人的操作性能。
🎯 应用场景
TacSL可广泛应用于机器人操作、物体抓取、装配等接触密集型任务。通过高效的仿真和策略学习,可以降低机器人开发的成本和周期,提高机器人在复杂环境中的适应性和鲁棒性。未来,TacSL有望推动触觉感知在工业自动化、医疗机器人、服务机器人等领域的应用。
📄 摘要(原文)
For both humans and robots, the sense of touch, known as tactile sensing, is critical for performing contact-rich manipulation tasks. Three key challenges in robotic tactile sensing are 1) interpreting sensor signals, 2) generating sensor signals in novel scenarios, and 3) learning sensor-based policies. For visuotactile sensors, interpretation has been facilitated by their close relationship with vision sensors (e.g., RGB cameras). However, generation is still difficult, as visuotactile sensors typically involve contact, deformation, illumination, and imaging, all of which are expensive to simulate; in turn, policy learning has been challenging, as simulation cannot be leveraged for large-scale data collection. We present TacSL (taxel), a library for GPU-based visuotactile sensor simulation and learning. TacSL can be used to simulate visuotactile images and extract contact-force distributions over $200\times$ faster than the prior state-of-the-art, all within the widely-used Isaac Simulator. Furthermore, TacSL provides a learning toolkit containing multiple sensor models, contact-intensive training environments, and online/offline algorithms that can facilitate policy learning for sim-to-real applications. On the algorithmic side, we introduce a novel online reinforcement-learning algorithm called asymmetric actor-critic distillation (AACD), designed to effectively and efficiently learn tactile-based policies in simulation that can transfer to the real world. Finally, we demonstrate the utility of our library and algorithms by evaluating the benefits of distillation and multimodal sensing for contact-rich manipulation tasks, and most critically, performing sim-to-real transfer. Supplementary videos and results are at https://iakinola23.github.io/tacsl/.