Developing Smart MAVs for Autonomous Inspection in GPS-denied Constructions
作者: Paoqiang Pan, Kewei Hu, Xiao Huang, Wei Ying, Xiaoxuan Xie, Yue Ma, Naizhong Zhang, Hanwen Kang
分类: cs.RO
发布日期: 2024-08-12
💡 一句话要点
提出一种用于GPS拒止环境自主巡检的智能MAV框架,实现高精度三维重建。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 自主巡检 微型飞行器 GPS拒止环境 三维重建 神经重建 路径规划 分层感知
📋 核心要点
- 传统GPS拒止环境下的无人机巡检依赖人工操作,效率低且易出错,难以满足复杂场景需求。
- 论文提出分层感知与规划系统,结合神经重建技术,优化MAV在GPS拒止环境下的自主巡检路径。
- 实验表明,该MAV系统在室内环境中实现了100%的扫描路径生成和执行成功率,跟踪误差小于0.1米。
📝 摘要(中文)
本研究提出了一种用于GPS拒止环境(如工业设施和基础设施)中智能微型飞行器(MAV)自主巡检的创新框架。该框架包含一个分层感知和规划系统,用于识别感兴趣区域并优化任务路径。同时,集成神经重建技术,构建了一个具有增强定位和运动规划能力的高级MAV系统,用于建筑结构的全面三维重建。在一个4000平方米的室内基础设施中验证了该框架的有效性,实验结果表明,该MAV系统在自主巡检任务中表现出色,扫描路径生成和执行成功率达100%。运动规划成功率达100%,跟踪误差小于0.1米。此外,使用3D高斯溅射技术的增强重建方法能够从采集的数据中生成高保真渲染模型。该方法代表了机器人技术在基础设施巡检应用中的一项重大进步。
🔬 方法详解
问题定义:论文旨在解决GPS拒止的复杂室内环境下,传统人工无人机巡检效率低、易出错的问题。现有方法难以实现自主导航、精确三维重建和高效的巡检路径规划。
核心思路:论文的核心思路是构建一个分层感知与规划系统,结合先进的定位、运动规划和三维重建技术,使MAV能够在GPS拒止环境中自主导航、识别感兴趣区域并生成高效的巡检路径。通过神经重建技术,实现高精度的三维模型重建。
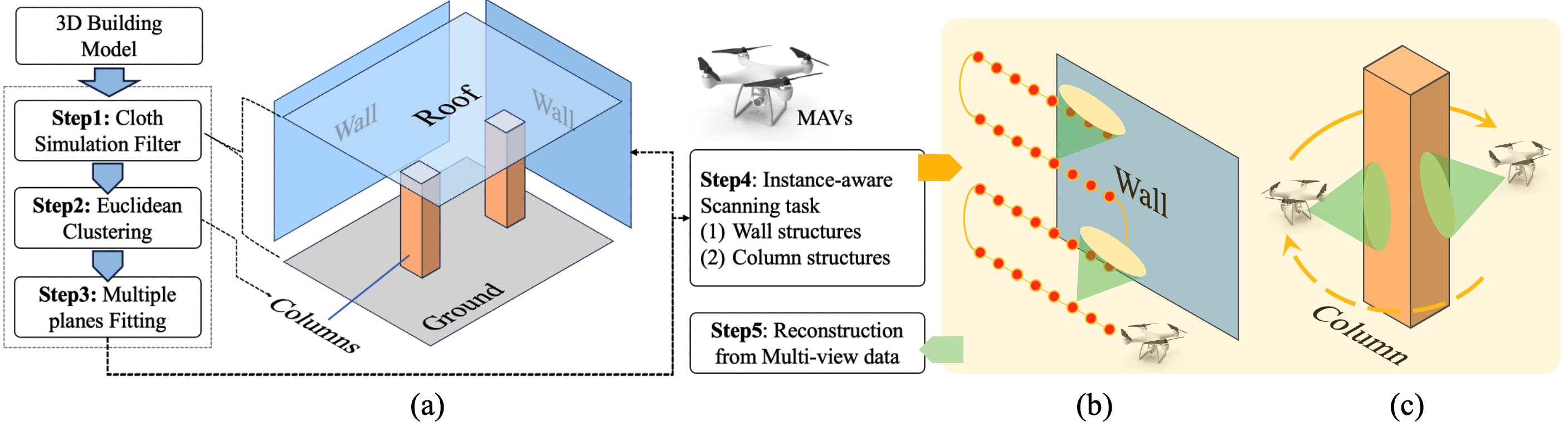
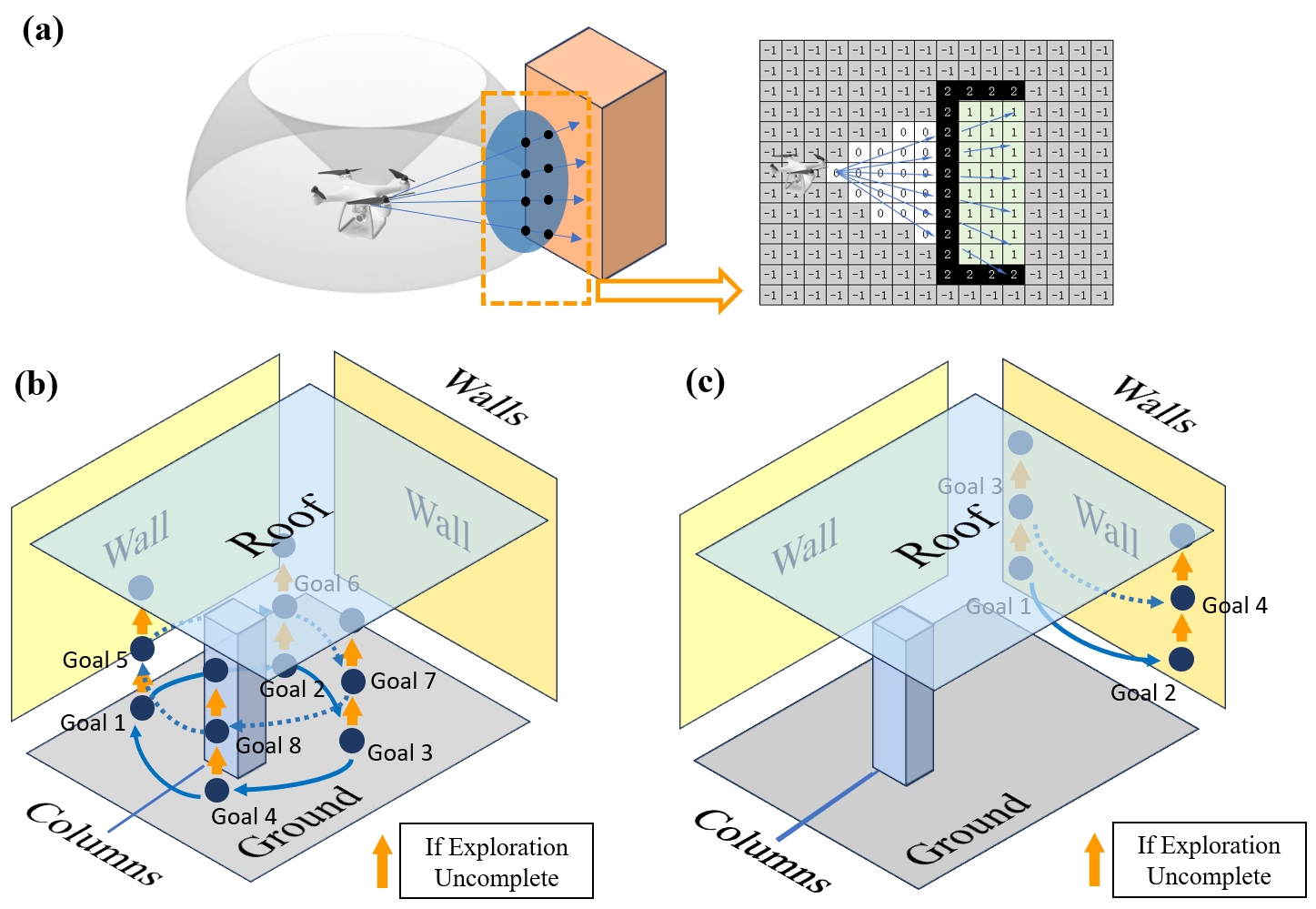
技术框架:该框架包含以下主要模块:1) 分层感知模块,用于识别感兴趣区域;2) 路径规划模块,用于优化巡检路径;3) MAV系统,集成了增强的定位和运动规划能力;4) 三维重建模块,使用神经重建技术生成建筑结构的三维模型。整体流程为:首先,分层感知模块识别感兴趣区域,然后路径规划模块生成巡检路径,MAV系统根据路径进行自主导航和数据采集,最后三维重建模块利用采集的数据生成三维模型。
关键创新:该论文的关键创新在于:1) 提出了一个适用于GPS拒止环境的分层感知与规划系统;2) 将神经重建技术集成到MAV系统中,实现了高精度的三维重建;3) 优化了MAV的定位和运动规划能力,使其能够在复杂室内环境中稳定飞行。与现有方法相比,该方法能够实现更高效、更精确的自主巡检。
关键设计:论文中使用了3D高斯溅射技术进行三维重建,该技术能够生成高保真渲染模型。运动规划模块采用了特定的算法(具体算法未知)以保证100%的成功率和小于0.1米的跟踪误差。分层感知模块的具体实现细节(如使用的传感器类型、特征提取方法等)未知。
🖼️ 关键图片
📊 实验亮点
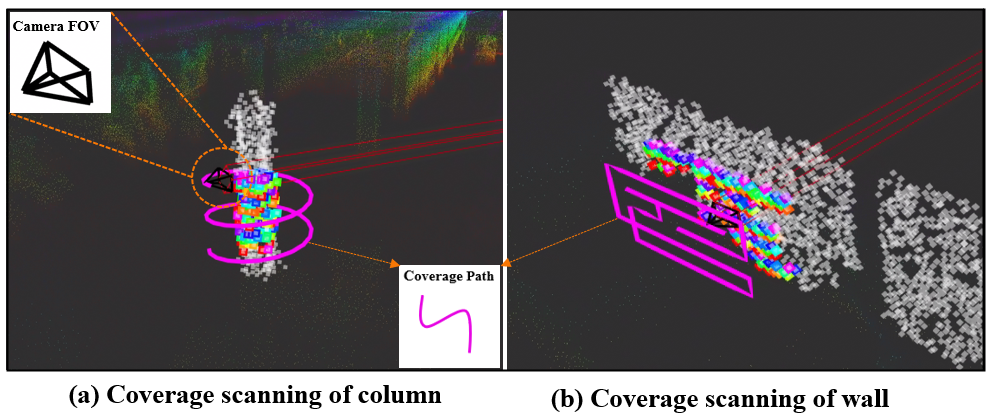
实验在一个4000平方米的室内环境中进行,结果表明,该MAV系统在自主巡检任务中表现出色,扫描路径生成和执行成功率达100%。运动规划成功率达100%,跟踪误差小于0.1米。此外,使用3D高斯溅射技术的增强重建方法能够从采集的数据中生成高保真渲染模型,为后续分析提供高质量的数据支持。
🎯 应用场景
该研究成果可广泛应用于基础设施巡检、工业设施监控、建筑安全评估等领域。通过自主巡检和高精度三维重建,可以有效提高巡检效率、降低人工成本、提升安全水平。未来,该技术有望应用于智慧城市建设、灾害应急响应等更广泛的领域。
📄 摘要(原文)
Smart Micro Aerial Vehicles (MAVs) have transformed infrastructure inspection by enabling efficient, high-resolution monitoring at various stages of construction, including hard-to-reach areas. Traditional manual operation of drones in GPS-denied environments, such as industrial facilities and infrastructure, is labour-intensive, tedious and prone to error. This study presents an innovative framework for smart MAV inspections in such complex and GPS-denied indoor environments. The framework features a hierarchical perception and planning system that identifies regions of interest and optimises task paths. It also presents an advanced MAV system with enhanced localisation and motion planning capabilities, integrated with Neural Reconstruction technology for comprehensive 3D reconstruction of building structures. The effectiveness of the framework was empirically validated in a 4,000 square meters indoor infrastructure facility with an interior length of 80 metres, a width of 50 metres and a height of 7 metres. The main structure consists of columns and walls. Experimental results show that our MAV system performs exceptionally well in autonomous inspection tasks, achieving a 100\% success rate in generating and executing scan paths. Extensive experiments validate the manoeuvrability of our developed MAV, achieving a 100\% success rate in motion planning with a tracking error of less than 0.1 metres. In addition, the enhanced reconstruction method using 3D Gaussian Splatting technology enables the generation of high-fidelity rendering models from the acquired data. Overall, our novel method represents a significant advancement in the use of robotics for infrastructure inspection.