Moving past point-contacts: Extending the ALIP model to humanoids with non-trivial feet using hierarchical, full-body momentum control
作者: Victor C. Paredes, Daniel A. Hagen, Samuel W. Chesebrough, Riley Swann, Denis Garagic, Ayonga Hereid
分类: cs.RO, eess.SY
发布日期: 2024-08-09
备注: 7 pages, 9 figures
💡 一句话要点
提出基于全身动力学控制的ALIP扩展模型,用于非点接触足部的人形机器人运动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 双足机器人 运动规划 全身控制 角动量 线性倒立摆
📋 核心要点
- 传统ALIP模型在处理具有复杂足部几何形状和非平凡惯性分布的双足机器人时存在局限性,其假设不再成立。
- 本文提出一种基于全身动力学控制的ALIP扩展模型,通过调节质心角动量,使机器人行为符合期望的模板动力学。
- 在Sarcos Guardian XO机器人上的仿真结果表明,该方法能够实现稳定且通用的双足运动。
📝 摘要(中文)
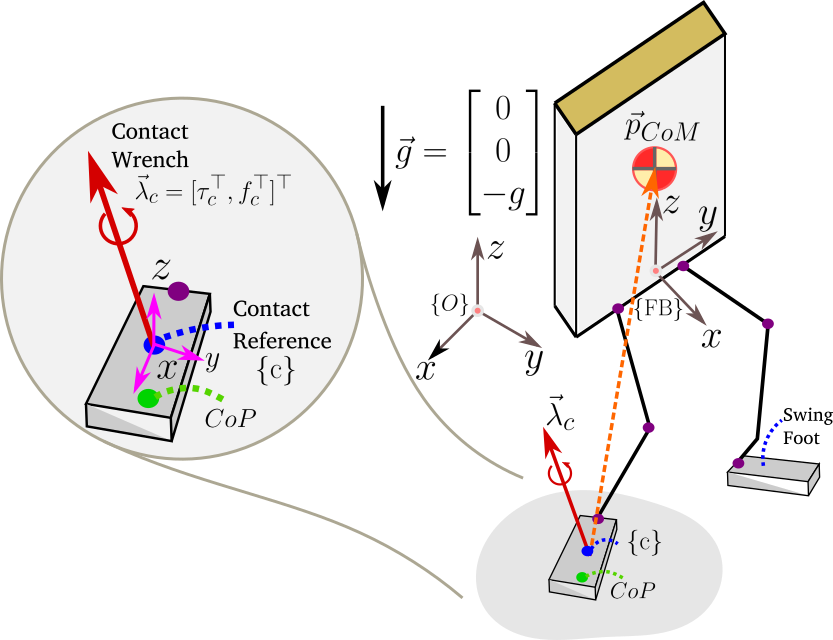
本文针对具有复杂足部几何形状(如扁平足)和非平凡躯干/肢体惯性及质量分布(如非中心化手臂)的通用双足机器人,扩展了角动量线性倒立摆(ALIP)模型。传统ALIP模型依赖于点接触足或被动踝关节以及可忽略的质心角动量这两个假设,这在通用双足机器人中不再成立。本文提出了一种ALIP规划器,通过使用任务空间全身控制器调节质心角动量,确保机器人行为与期望的模板动力学对齐。通过Sarcos Guardian XO机器人(一种具有大型偏移足部的混合人形/外骨骼机器人)的仿真实验,验证了该方法在实现稳定和通用双足运动方面的有效性和实用性。
🔬 方法详解
问题定义:传统ALIP模型假设机器人具有点接触足或被动踝关节,并且质心角动量可以忽略不计。然而,对于具有复杂足部几何形状(如扁平足)和非平凡躯干/肢体惯性及质量分布(如非中心化手臂)的通用双足机器人,这些假设不再成立。因此,需要一种新的方法来扩展ALIP模型,使其能够处理这些更复杂的机器人系统。
核心思路:本文的核心思路是通过一个任务空间全身控制器来调节质心角动量,从而确保机器人的行为与期望的ALIP模板动力学对齐。通过精确控制质心角动量,可以补偿由于复杂足部几何形状和非平凡惯性分布引起的非理想效应,从而使ALIP模型能够应用于更广泛的机器人系统。
技术框架:该方法包含以下主要模块:首先,使用ALIP模型生成期望的质心运动轨迹。然后,使用任务空间全身控制器,根据期望的质心运动轨迹和实际的机器人状态,计算出关节力矩。该控制器旨在调节质心角动量,使其与ALIP模型预测的值相匹配。最后,将计算出的关节力矩发送到机器人,驱动其执行期望的运动。
关键创新:该方法最重要的技术创新点在于将ALIP模型与全身动力学控制相结合,从而能够处理具有复杂足部几何形状和非平凡惯性分布的机器人。与传统的ALIP方法相比,该方法不需要对机器人的足部几何形状和惯性分布进行简化,因此可以应用于更广泛的机器人系统。
关键设计:任务空间全身控制器的设计是该方法的关键。该控制器需要能够精确地调节质心角动量,同时还要考虑到机器人的关节限制和力矩限制。控制器通常基于二次规划(QP)框架,其中目标函数旨在最小化质心角动量误差和关节力矩,约束条件包括机器人的动力学方程、关节限制和力矩限制。控制器的具体参数需要根据机器人的具体特性进行调整。
🖼️ 关键图片


📊 实验亮点
通过在Sarcos Guardian XO机器人上的仿真实验,验证了该方法的有效性。实验结果表明,该方法能够使机器人实现稳定且通用的双足运动,即使在存在大型偏移足部的情况下也能保持平衡。具体的性能数据(例如,质心位置误差、角动量误差等)未在摘要中明确给出,但实验结果表明该方法具有良好的性能。
🎯 应用场景
该研究成果可应用于各种双足机器人,特别是那些具有复杂足部几何形状和非平凡惯性分布的机器人,例如人形机器人、外骨骼机器人和假肢。该方法可以提高这些机器人的运动稳定性和通用性,使其能够执行更复杂的任务,例如在不平坦地形上行走、搬运重物和进行精细操作。此外,该方法还可以用于开发更逼真和自然的机器人运动控制系统。
📄 摘要(原文)
The Angular-Momentum Linear Inverted Pendulum (ALIP) model is a promising motion planner for bipedal robots. However, it relies on two assumptions: (1) the robot has point-contact feet or passive ankles, and (2) the angular momentum around the center of mass, known as centroidal angular momentum, is negligible. This paper addresses the question of whether the ALIP paradigm can be applied to more general bipedal systems with complex foot geometry (e.g., flat feet) and nontrivial torso/limb inertia and mass distribution (e.g., non-centralized arms). In such systems, the dynamics introduce non-negligible centroidal momentum and contact wrenches at the feet, rendering the assumptions of the ALIP model invalid. This paper presents the ALIP planner for general bipedal robots with non-point-contact feet through the use of a task-space whole-body controller that regulates centroidal momentum, thereby ensuring that the robot's behavior aligns with the desired template dynamics. To demonstrate the effectiveness of our proposed approach, we conduct simulations using the Sarcos Guardian XO robot, which is a hybrid humanoid/exoskeleton with large, offset feet. The results demonstrate the practicality and effectiveness of our approach in achieving stable and versatile bipedal locomotion.