Dancing with REEM-C: A robot-to-human physical-social communication study
作者: Marie Charbonneau, Francisco Javier Andrade Chavez, Katja Mombaur
分类: cs.RO
发布日期: 2024-08-09 (更新: 2025-08-15)
备注: 21 pages, 16 figures
💡 一句话要点
提出基于全身控制框架的人形机器人舞蹈引导系统,提升人机共舞的舒适性和有效性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机交互 物理社交交互 全身控制 导纳控制 阻抗控制 机器人舞蹈 人机协作
📋 核心要点
- 现有机器人难以在物理交互中有效传递信息,限制了人机协作解决实际问题的潜力。
- 论文提出一种基于全身控制的机器人舞蹈引导方法,通过触觉、视觉和听觉等多模态信号引导人类舞伴。
- 实验验证了控制器的性能,并评估了不同通信方式对人类舞伴的舒适度和有效性的影响。
📝 摘要(中文)
本文研究了在物理社交人机交互(psHRI)中,如何建立清晰直观的机器人到人的通信,同时考虑人类的舒适度。以机器人引导人类跳舞的场景为例,通过触觉、视觉和听觉信号,全身人形机器人引导人类舞伴。为此,开发了一种分离式全身控制框架,将上身的导纳和阻抗控制与下身的位置控制相结合,以实现平衡和步进。通过机器人引导的psHRI实验,验证了控制器的性能,并深入了解了从人类伙伴的角度来看,哪些类型的通信方式更有效,尤其是在感知有效性和舒适度方面。
🔬 方法详解
问题定义:论文旨在解决人机物理社交交互中,机器人如何有效、舒适地向人类传递信息的问题。现有方法在物理交互方面存在不足,难以实现自然流畅的人机协作,尤其是在需要复杂动作协调的场景中,例如舞蹈。现有方法的痛点在于缺乏对人类舒适度和交互意图的有效建模,导致交互体验不佳。
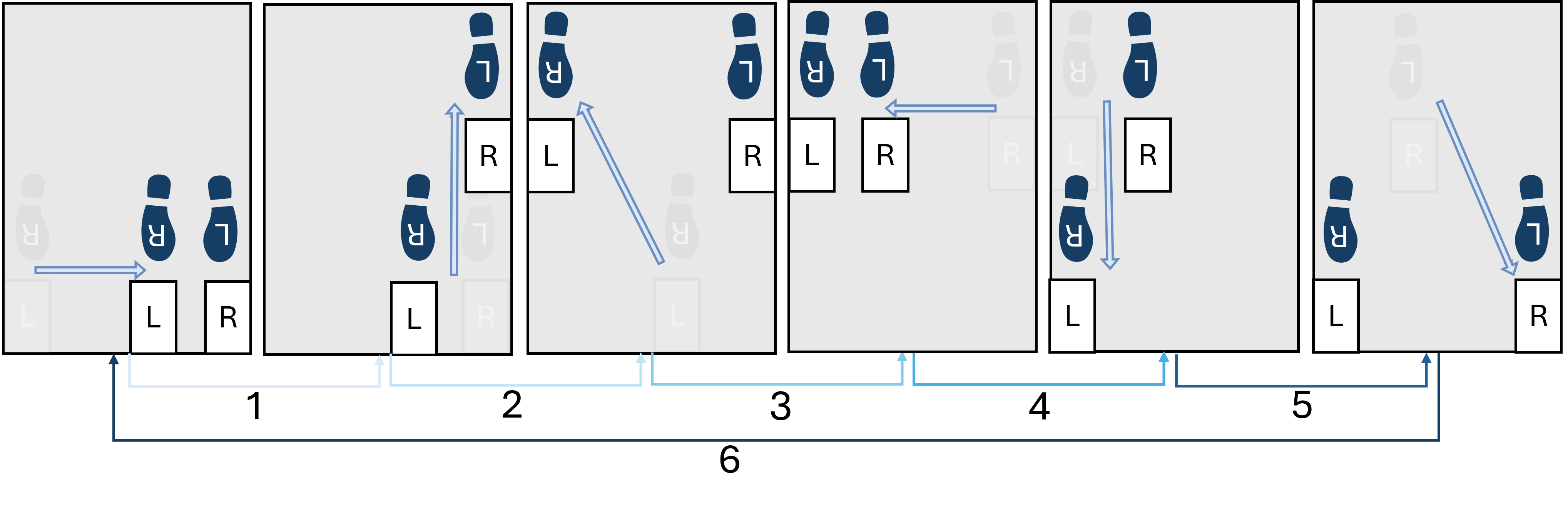
核心思路:论文的核心思路是将机器人舞蹈引导问题建模为一个领导者-跟随者模型,机器人作为领导者,通过多种通信模态(触觉、视觉、听觉)向人类舞伴传递下一步动作的信息。通过控制机器人的姿态和力,引导人类舞伴完成舞蹈动作。核心在于设计一个能够平衡机器人自身运动控制和人机交互力控制的全身控制框架。
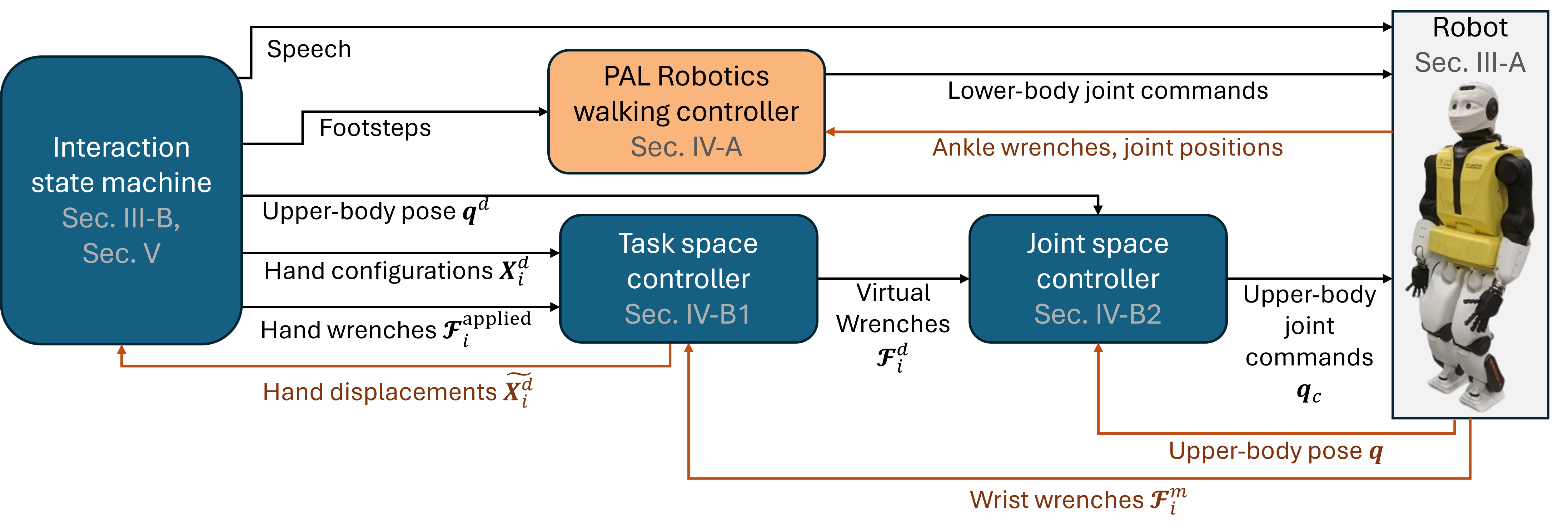
技术框架:整体框架是一个分离式的全身控制系统。该系统将机器人的身体分为上下两部分,上身采用导纳和阻抗控制,用于实现与人类的物理交互,传递舞蹈引导信号;下身采用位置控制,用于保持平衡和执行步进动作。系统包含以下主要模块:运动规划模块(生成舞蹈轨迹)、力/位混合控制模块(实现上身的导纳/阻抗控制和下身的位置控制)、通信模块(处理触觉、视觉和听觉信号)。
关键创新:论文的关键创新在于将导纳/阻抗控制与位置控制相结合,实现全身的协调运动和人机交互。这种混合控制策略允许机器人在保持自身平衡的同时,能够灵活地与人类进行物理交互,传递引导信息。此外,论文还通过实验评估了不同通信模态对人机交互效果的影响,为未来的psHRI系统设计提供了参考。
关键设计:上身的导纳控制允许机器人根据人类施加的力调整自身姿态,实现柔顺的交互。阻抗控制则用于调节机器人的刚度,控制交互力的大小。下身的位置控制采用PID控制器,保证机器人的平衡和步进精度。实验中,研究人员调整了导纳和阻抗控制器的参数,以优化人机交互的舒适度和有效性。具体的参数设置和损失函数(如果使用)在论文中未明确给出,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,基于全身控制框架的机器人舞蹈引导系统能够有效地引导人类舞伴完成舞蹈动作。通过对比不同通信模态的效果,发现触觉引导在舒适度和有效性方面表现更佳。具体的性能数据和提升幅度在摘要中未明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于康复训练、辅助教学、娱乐互动等领域。例如,可以利用机器人引导老年人进行康复训练,帮助他们恢复运动能力;也可以用于舞蹈教学,让初学者更容易掌握舞蹈技巧。此外,该技术还可以应用于人机协作的工业场景,提高生产效率和安全性。
📄 摘要(原文)
Humans often work closely together and relay a wealth of information through physical interaction. Robots, on the other hand, are not yet able to work similarly closely with humans and to effectively convey information when engaging in physical-social human-robot interaction (psHRI). This currently limits the potential of human-robot collaboration to solve real-world problems. This paper investigates how to establish clear and intuitive robot-to-human communication, while considering human comfort during psHRI. We approach this question from the perspective of a leader-follower dancing scenario, in which a full-body humanoid robot leads a human by signaling the next steps through a choice of communication modalities including haptic, visual, and audio signals. This is achieved through the development of a split whole-body control framework combining admittance and impedance control on the upper body, with position control on the lower body for balancing and stepping. Robot-led psHRI participant experiments allowed us to verify controller performance, as well as to build an understanding of what types of communication work better from the perspective of human partners, particularly in terms of perceived effectiveness and comfort.