Few-shot Scooping Under Domain Shift via Simulated Maximal Deployment Gaps
作者: Yifan Zhu, Pranay Thangeda, Erica L Tevere, Ashish Goel, Erik Kramer, Hari D Nayar, Melkior Ornik, Kris Hauser
分类: cs.RO, cs.AI, eess.SY
发布日期: 2024-08-06
备注: arXiv admin note: substantial text overlap with arXiv:2303.02893
💡 一句话要点
提出kCMD方法,通过模拟最大部署差距解决域偏移下的少样本挖掘问题
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 少样本学习 域偏移 机器人挖掘 元学习 深度核高斯过程
📋 核心要点
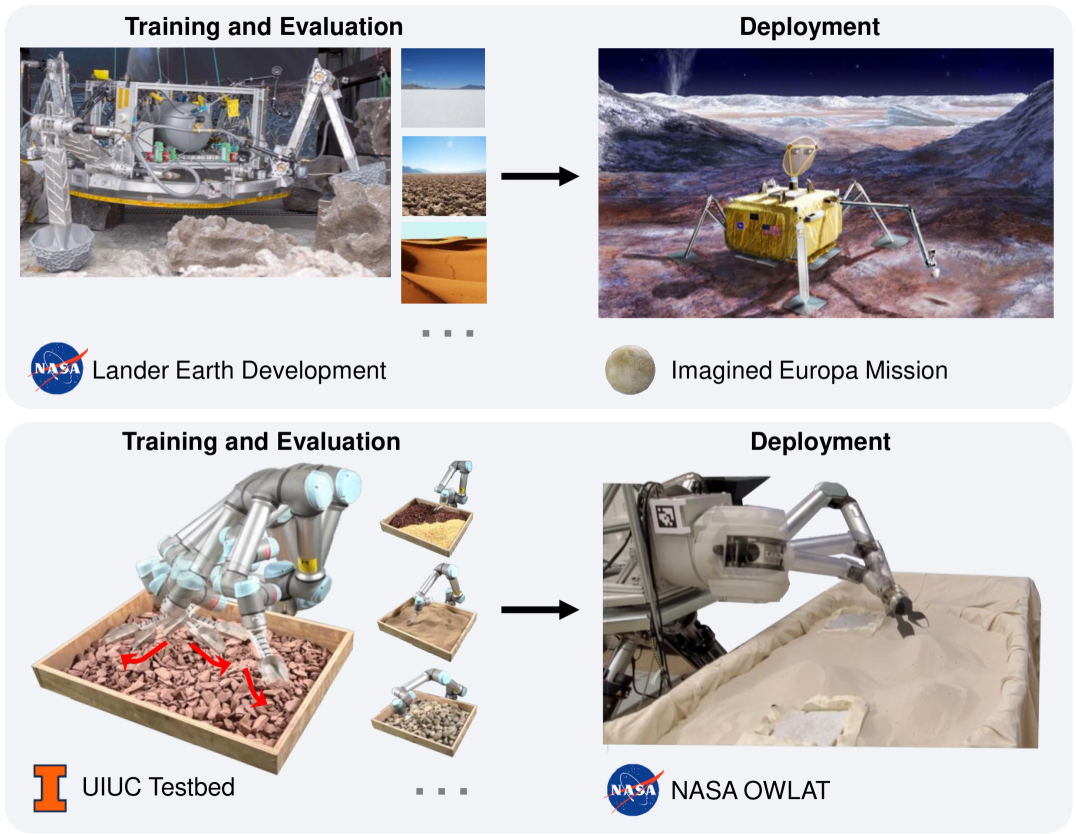
- 地外天体采样任务面临地球与目标地形的域偏移问题,现有方法难以适应这种差异。
- 论文提出kCMD策略,通过模拟最大部署差距训练深度核模型,提升模型在域偏移下的泛化能力。
- 实验表明,kCMD方法在少样本挖掘任务中显著优于现有方法,并成功迁移到NASA OWLAT平台。
📝 摘要(中文)
本文研究了域偏移下的少样本挖掘问题,针对地外天体自主着陆采样任务中,采样策略难以适应地球与目标地形差异的挑战,提出了一种基于视觉的自适应挖掘策略。该策略利用深度核高斯过程方法,通过新颖的元训练策略进行训练,从而能够在分布外目标地形上从有限的经验中在线学习。提出的深度核校准与最大部署差距(kCMD)策略,通过从离线训练数据集中创建模拟的最大部署差距,显式地训练深度核模型以适应大的域偏移,并在训练期间训练模型以克服这些部署差距。该方法应用于贝叶斯优化序列决策框架中,使机器人能够在几次尝试后在分布外地形上执行高质量的挖掘动作,显著优于挖掘文献中提出的非自适应方法以及其他最先进的元学习方法。该方法还展示了零样本迁移能力,成功适应了NASA OWLAT平台,该平台是未来潜在行星任务的最先进的模拟器。这些结果证明了使用模拟部署差距训练深度模型在具有高容量模型的更通用的元学习中的潜力。此外,它们突出了我们的方法在自主着陆器采样任务中的前景,使着陆器能够克服地球和地外天体之间的部署差距。
🔬 方法详解
问题定义:论文旨在解决地外天体采样任务中,由于地球与目标地形存在显著差异(即域偏移),导致在地球上训练的挖掘策略难以直接应用于地外环境的问题。现有的挖掘方法通常依赖于大量数据进行训练,或者缺乏对域偏移的鲁棒性,无法在少样本情况下快速适应新的地形。
核心思路:论文的核心思路是通过模拟训练数据和真实部署环境之间的最大差距(Maximal Deployment Gaps),来增强模型的泛化能力。具体来说,就是在训练过程中,人为地引入一些与训练数据差异较大的样本,迫使模型学习如何克服这些差距,从而提高其在真实部署环境中的适应性。
技术框架:整体框架是一个基于贝叶斯优化的序列决策过程。首先,使用离线数据集训练一个深度核高斯过程模型。然后,在实际挖掘过程中,利用贝叶斯优化算法选择下一步的挖掘动作,并根据实际的挖掘结果更新模型。kCMD策略嵌入在贝叶斯优化框架中,用于指导模型的训练和更新,使其能够更好地适应新的地形。
关键创新:最重要的创新点在于提出了“最大部署差距”的概念,并将其应用于深度核模型的训练中。通过显式地模拟训练数据和真实环境之间的差距,可以有效地提高模型的泛化能力,使其能够在少样本情况下快速适应新的环境。与传统的元学习方法相比,kCMD策略更加关注于解决域偏移问题,而不是简单地学习如何从少量样本中进行泛化。
关键设计:kCMD策略的关键设计包括:1) 使用深度核高斯过程模型,该模型具有较强的非线性建模能力和不确定性估计能力;2) 设计了一种元训练策略,通过模拟最大部署差距来训练模型;3) 将kCMD策略嵌入到贝叶斯优化框架中,利用贝叶斯优化算法选择挖掘动作,并根据实际结果更新模型。具体的损失函数和网络结构等细节在论文中进行了详细描述(未知)。
🖼️ 关键图片


📊 实验亮点
实验结果表明,提出的kCMD方法在少样本挖掘任务中显著优于现有的非自适应方法和元学习方法。具体来说,kCMD方法能够在几次尝试后在分布外地形上执行高质量的挖掘动作,并且成功地零样本迁移到NASA OWLAT平台,验证了其在实际应用中的潜力。具体的性能提升数据在论文中进行了详细描述(未知)。
🎯 应用场景
该研究成果可应用于地外天体自主着陆采样任务,例如月球、火星等行星的土壤采样。通过提高采样策略对域偏移的鲁棒性,可以降低任务失败的风险,并提高采样效率。此外,该方法还可以推广到其他需要处理域偏移问题的机器人应用中,例如自动驾驶、农业机器人等。
📄 摘要(原文)
Autonomous lander missions on extraterrestrial bodies need to sample granular materials while coping with domain shifts, even when sampling strategies are extensively tuned on Earth. To tackle this challenge, this paper studies the few-shot scooping problem and proposes a vision-based adaptive scooping strategy that uses the deep kernel Gaussian process method trained with a novel meta-training strategy to learn online from very limited experience on out-of-distribution target terrains. Our Deep Kernel Calibration with Maximal Deployment Gaps (kCMD) strategy explicitly trains a deep kernel model to adapt to large domain shifts by creating simulated maximal deployment gaps from an offline training dataset and training models to overcome these deployment gaps during training. Employed in a Bayesian Optimization sequential decision-making framework, the proposed method allows the robot to perform high-quality scooping actions on out-of-distribution terrains after a few attempts, significantly outperforming non-adaptive methods proposed in the excavation literature as well as other state-of-the-art meta-learning methods. The proposed method also demonstrates zero-shot transfer capability, successfully adapting to the NASA OWLAT platform, which serves as a state-of-the-art simulator for potential future planetary missions. These results demonstrate the potential of training deep models with simulated deployment gaps for more generalizable meta-learning in high-capacity models. Furthermore, they highlight the promise of our method in autonomous lander sampling missions by enabling landers to overcome the deployment gap between Earth and extraterrestrial bodies.