Context-aware Mamba-based Reinforcement Learning for social robot navigation
作者: Syed Muhammad Mustafa, Omema Rizvi, Zain Ahmed Usmani, Abdul Basit Memon, Muhammad Mobeen Movania
分类: cs.RO, eess.SY
发布日期: 2024-08-05 (更新: 2024-10-18)
💡 一句话要点
提出基于上下文感知的Mamba强化学习方法CAMRL,用于社交机器人导航。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 社交机器人导航 强化学习 Mamba模型 状态空间模型 上下文感知
📋 核心要点
- 社交机器人导航需要在复杂行人环境中安全有效地行动,现有方法难以兼顾效率与社会规范。
- CAMRL利用Mamba模型学习环境状态表示,并结合强化学习,优化机器人导航策略,实现安全高效的导航。
- 实验表明,CAMRL在成功率、碰撞避免和安全距离保持方面优于CADRL、LSTM-RL和SARL等基线方法。
📝 摘要(中文)
社交机器人导航(SRN)是一个重要的研究问题,它涉及在行人密集的环境中以一种社会可接受的方式进行导航。这是使社交机器人在行人密集环境中有效工作的关键。此类机器人的用例可能包括陪伴机器人、仓库机器人和自动轮椅。近年来,深度强化学习越来越多地应用于社交机器人导航的研究。本文介绍了CAMRL(Context-Aware Mamba-based Reinforcement Learning)。Mamba是一种新的基于深度学习的状态空间模型(SSM),在序列任务中取得了与Transformer相当的结果。CAMRL使用Mamba来确定机器人的下一个动作,该动作最大化了神经网络预测的下一个状态的价值,从而使机器人能够根据分配的奖励有效地导航。我们使用严格的测试数据集评估了CAMRL以及现有的解决方案(CADRL、LSTM-RL、SARL),该数据集涉及基于ORCA和SFM的各种密度和环境行为,从而证明CAMRL实现了更高的成功率,最大限度地减少了碰撞,并与行人保持了更安全的距离。这项工作引入了一种新的SRN规划器,展示了深度状态空间模型在机器人导航方面的潜力。
🔬 方法详解
问题定义:社交机器人导航(SRN)旨在使机器人在行人密集的动态环境中安全、高效且符合社会规范地移动。现有基于深度强化学习的方法,如CADRL、LSTM-RL和SARL等,在处理长程依赖和上下文信息方面存在局限性,导致导航效率不高或违反社会规范。
核心思路:本文的核心思路是利用Mamba模型强大的序列建模能力,捕捉环境中的长程依赖关系和上下文信息,从而更准确地预测未来状态,并指导机器人做出更明智的导航决策。Mamba模型能够有效地处理序列数据,并具有线性复杂度,使其适用于实时机器人导航。
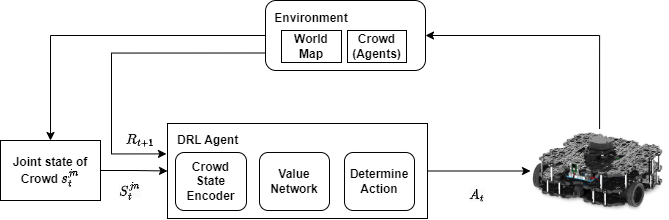
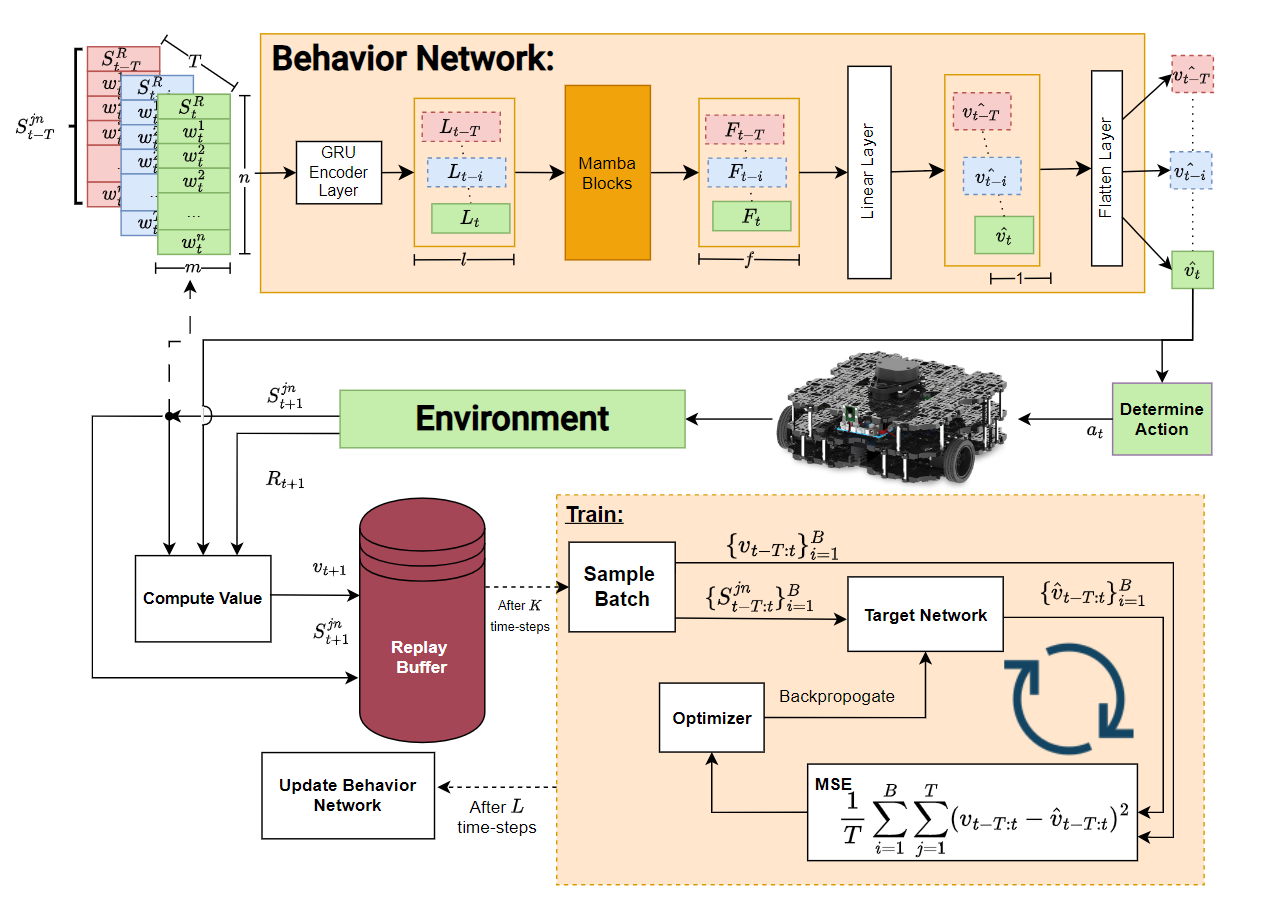
技术框架:CAMRL(Context-Aware Mamba-based Reinforcement Learning)框架主要包含以下几个模块:1) 环境感知模块:负责获取周围环境的信息,例如行人位置、速度等。2) Mamba模型:用于学习环境状态的表示,并预测未来状态。3) 强化学习模块:基于Mamba模型预测的未来状态,选择最优的动作,并根据环境反馈更新策略。整体流程是,机器人首先通过环境感知模块获取环境信息,然后将信息输入到Mamba模型中,Mamba模型预测未来状态,强化学习模块根据预测的未来状态选择最优动作,机器人执行该动作,并获得环境的反馈,最后根据反馈更新Mamba模型和强化学习策略。
关键创新:该论文的关键创新在于将Mamba模型引入到社交机器人导航的强化学习框架中。与传统的RNN或Transformer模型相比,Mamba模型具有线性复杂度,能够更有效地处理长序列数据,并捕捉环境中的长程依赖关系。此外,CAMRL还结合了上下文信息,例如行人密度和社会规范,从而使机器人能够做出更符合社会规范的导航决策。
关键设计:CAMRL使用Mamba作为状态表示学习器,其网络结构包括选择机制和线性时间不变层。奖励函数的设计考虑了导航成功、碰撞惩罚和社会距离保持。具体参数设置和损失函数细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,CAMRL在各种行人密度和环境行为下,均优于CADRL、LSTM-RL和SARL等基线方法。具体来说,CAMRL实现了更高的成功率,最大限度地减少了碰撞,并与行人保持了更安全的距离。这些结果表明,Mamba模型在社交机器人导航中具有巨大的潜力。
🎯 应用场景
CAMRL具有广泛的应用前景,例如陪伴机器人、仓库机器人、自动轮椅等。它可以使这些机器人在复杂的行人环境中安全、高效且符合社会规范地移动,从而提高用户体验和工作效率。此外,该研究还可以应用于自动驾驶、智能交通等领域,为实现更智能、更安全的交通系统提供技术支持。
📄 摘要(原文)
Social robot navigation (SRN) is a relevant problem that involves navigating a pedestrian-rich environment in a socially acceptable manner. It is an essential part of making social robots effective in pedestrian-rich settings. The use cases of such robots could vary from companion robots to warehouse robots to autonomous wheelchairs. In recent years, deep reinforcement learning has been increasingly used in research on social robot navigation. Our work introduces CAMRL (Context-Aware Mamba-based Reinforcement Learning). Mamba is a new deep learning-based State Space Model (SSM) that has achieved results comparable to transformers in sequencing tasks. CAMRL uses Mamba to determine the robot's next action, which maximizes the value of the next state predicted by the neural network, enabling the robot to navigate effectively based on the rewards assigned. We evaluate CAMRL alongside existing solutions (CADRL, LSTM-RL, SARL) using a rigorous testing dataset which involves a variety of densities and environment behaviors based on ORCA and SFM, thus, demonstrating that CAMRL achieves higher success rates, minimizes collisions, and maintains safer distances from pedestrians. This work introduces a new SRN planner, showcasing the potential for deep-state space models for robot navigation.