A Jellyfish Cyborg: Exploiting Natural Embodied Intelligence as Soft Robots
作者: Dai Owaki, Max Austin, Shuhei Ikeda, Kazuya Okuizumi, Kohei Nakajima
分类: cs.RO
发布日期: 2024-08-04 (更新: 2024-10-25)
💡 一句话要点
利用水母的天然具身智能,提出了一种新型水母赛博格软体机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 水母赛博格 软体机器人 具身智能 储层计算 电刺激 运动预测 海洋监测
📋 核心要点
- 现有软体机器人运动控制方法缺乏生物系统的能量效率和适应性,水母赛博格为解决此问题提供了一种新途径。
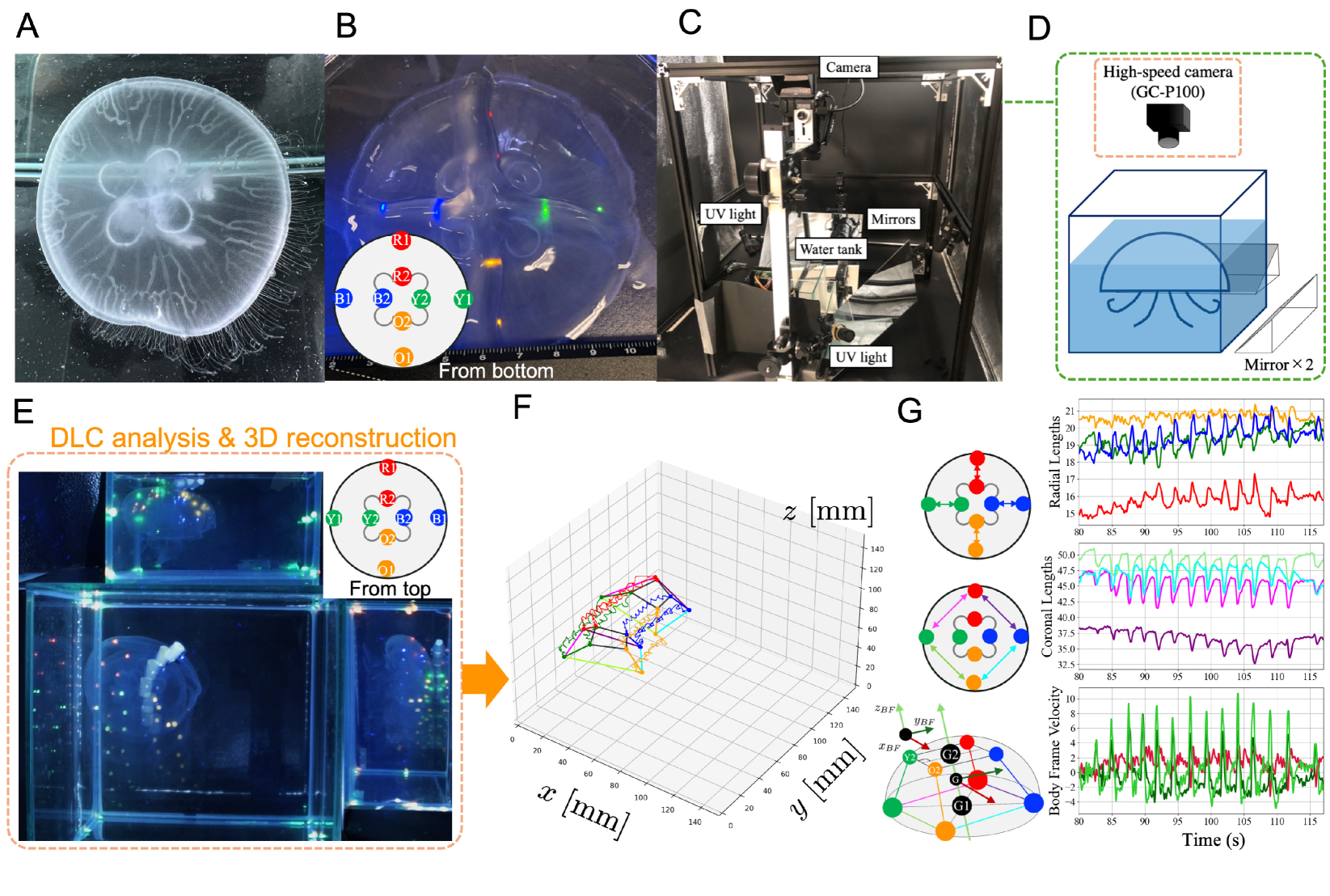
- 该研究利用水母的天然具身智能,结合电刺激和3D运动捕捉,预测并控制水母的运动。
- 实验成功预测了水母的运动,并确定了最佳电刺激周期,为自主导航和环境探索奠定基础。
📝 摘要(中文)
本文提出了一种有前景的软体机器人系统方案:水母赛博格。该方案利用生物系统固有的能量效率和适应性。通过集成肌肉电刺激和3D运动捕捉系统,量化了蓝色霞水母的自发和刺激诱导行为。利用储层计算这一机器学习框架,基于水母的当前体型和自然动态模式,成功预测了未来的运动。研究发现包括首次对水母游泳运动中的自组织临界性进行了研究,并确定了用于引发连贯且可预测的游泳行为的最佳刺激周期(1.5秒和2.0秒)。结果表明,水母的身体运动与有针对性的电刺激相结合,可以作为预测控制的计算资源。该研究为开发能够自主导航和环境探索的水母赛博格铺平了道路,在海洋监测和污染管理方面具有潜在的应用。
🔬 方法详解
问题定义:现有软体机器人在复杂环境下的运动控制面临挑战,尤其是在能量效率和适应性方面。传统方法往往依赖复杂的控制算法和大量的能量输入,难以模拟生物系统的自然运动能力。因此,如何利用生物系统的固有优势,开发出更高效、更灵活的软体机器人是一个亟待解决的问题。
核心思路:本文的核心思路是利用水母的天然具身智能,将水母的身体运动作为一种计算资源,通过电刺激来调控其运动行为,并使用机器学习方法预测其运动轨迹。这种方法充分利用了水母的自然运动模式和能量效率,避免了传统控制方法的复杂性和高能耗。
技术框架:该研究的技术框架主要包括以下几个模块:1) 肌肉电刺激系统:用于向水母施加电刺激,调控其运动行为。2) 3D运动捕捉系统:用于实时捕捉水母的身体运动数据。3) 储层计算模型:用于基于水母的当前体型和自然动态模式,预测其未来的运动轨迹。4) 集成控制系统:将电刺激、运动捕捉和储层计算模型集成在一起,实现对水母运动的预测和控制。
关键创新:本文最重要的技术创新点在于将水母的身体运动作为一种计算资源,并利用储层计算模型来预测其运动轨迹。与传统的控制方法相比,这种方法更加高效、灵活,并且能够更好地适应复杂环境。此外,该研究还首次对水母游泳运动中的自组织临界性进行了研究,为理解生物系统的运动控制机制提供了新的视角。
关键设计:在电刺激方面,研究确定了1.5秒和2.0秒为最佳刺激周期,能够引发连贯且可预测的游泳行为。在储层计算模型方面,研究使用了水母的身体形状和自然动态模式作为输入,预测其未来的运动轨迹。具体的网络结构和参数设置未知。
🖼️ 关键图片


📊 实验亮点
该研究首次对水母游泳运动中的自组织临界性进行了研究,并确定了1.5秒和2.0秒为引发连贯且可预测游泳行为的最佳电刺激周期。通过储层计算,成功预测了水母的运动轨迹,验证了水母身体运动作为计算资源的可行性。这些结果为开发自主导航的水母赛博格奠定了基础。
🎯 应用场景
水母赛博格技术在海洋监测、污染管理和水下探索等领域具有广泛的应用前景。例如,可以利用水母赛博格进行海洋环境参数的实时监测,追踪污染物扩散路径,或者在危险水域进行水下勘探和搜救任务。此外,该技术还可以为软体机器人的设计和控制提供新的思路,促进相关领域的发展。
📄 摘要(原文)
Jellyfish cyborgs present a promising avenue for soft robotic systems, leveraging the natural energy-efficiency and adaptability of biological systems. Here we demonstrate a novel approach to predicting and controlling jellyfish locomotion by harnessing the natural embodied intelligence of these animals. We developed an integrated muscle electrostimulation and 3D motion capture system to quantify both spontaneous and stimulus-induced behaviors in Aurelia coerulea jellyfish. Using Reservoir Computing, a machine learning framework, we successfully predicted future movements based on the current body shape and natural dynamic patterns of the jellyfish. Our key findings include the first investigation of self-organized criticality in jellyfish swimming motions and the identification of optimal stimulus periods (1.5 and 2.0 seconds) for eliciting coherent and predictable swimming behaviors. These results suggest that the jellyfish body motion, combined with targeted electrostimulation, can serve as a computational resource for predictive control. Our findings pave the way for developing jellyfish cyborgs capable of autonomous navigation and environmental exploration, with potential applications in ocean monitoring and pollution management.