Interpreting and learning voice commands with a Large Language Model for a robot system
作者: Stanislau Stankevich, Wojciech Dudek
分类: cs.RO, cs.CL, cs.NE
发布日期: 2024-07-31
备注: PP-RAI 2024, 5th Polish Conference on Artificial Intelligence, 18-20.04.2024 Warsaw, Poland
💡 一句话要点
利用大型语言模型提升机器人语音指令理解与知识获取能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人 语音指令理解 大型语言模型 知识库 人机交互
📋 核心要点
- 现有机器人交互界面不够直观,难以实现便捷的人机沟通,限制了机器人在复杂环境中的应用。
- 该项目提出将大型语言模型与数据库相结合,提升机器人对语音指令的理解和知识获取能力,从而优化决策过程。
- 通过LLM与数据库的融合,机器人能够更好地解释用户请求,并根据知识库做出更合理的响应,提高适应性和功能性。
📝 摘要(中文)
机器人正日益普及于工业和日常生活中,例如在养老院协助工作人员。一个关键挑战是开发直观的交互界面,以便轻松进行通信。诸如GPT-4之类的大型语言模型(LLM)的运用,增强了机器人的能力,实现了实时交互和决策。这种集成提高了机器人的适应性和功能性。本项目专注于将LLM与数据库融合,以改进决策制定,并为请求解释问题实现知识获取。
🔬 方法详解
问题定义:论文旨在解决机器人系统中语音指令理解的难题。现有方法在处理复杂或模糊的语音指令时,往往表现出理解能力不足,无法准确执行用户意图。此外,机器人缺乏从交互中学习和积累知识的能力,导致重复性问题需要人工干预,效率较低。
核心思路:论文的核心思路是利用大型语言模型(LLM)强大的自然语言理解能力,将语音指令转化为机器人可以理解的语义表示。同时,将LLM与数据库连接,使机器人能够查询和利用外部知识,从而更准确地解释指令并做出决策。这种结合使得机器人不仅能理解指令,还能根据上下文和知识库进行推理。
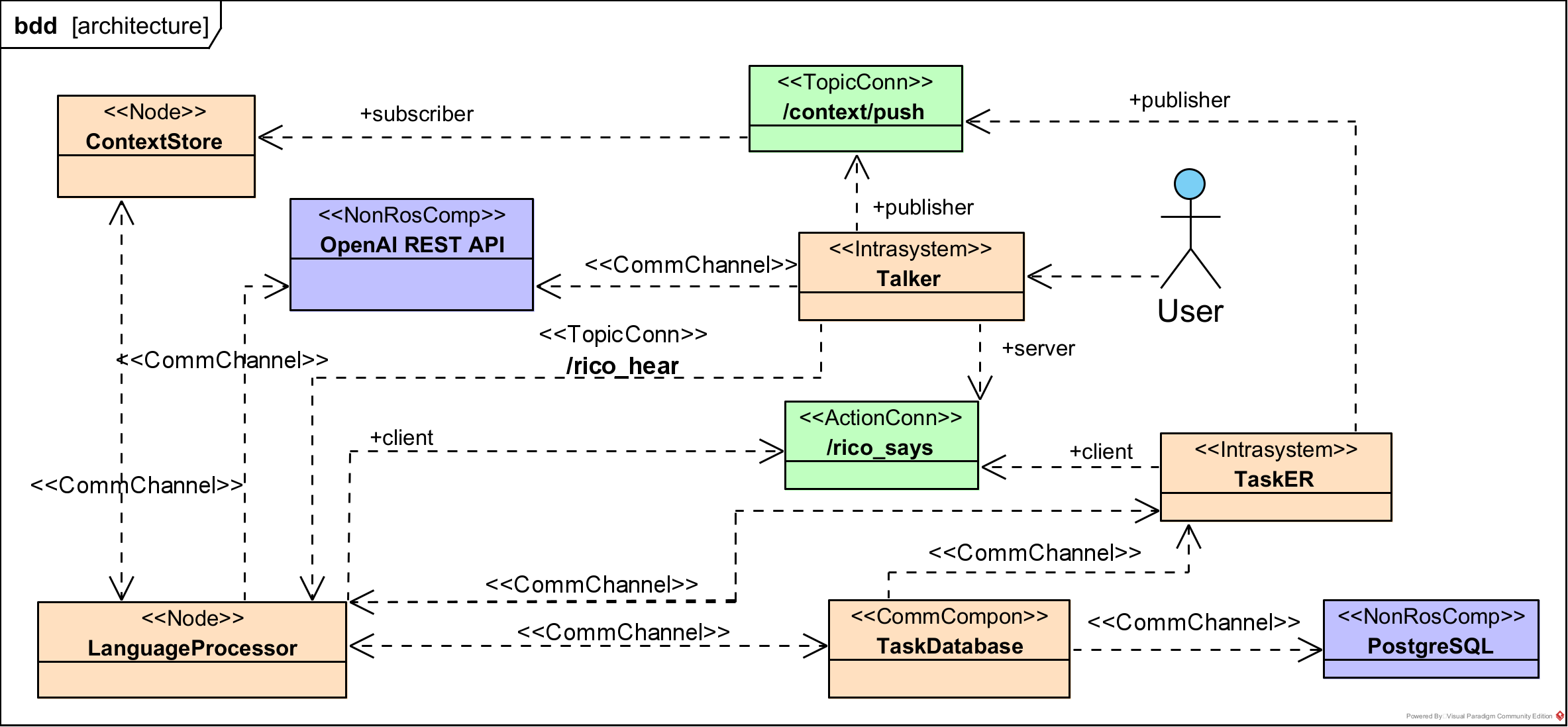
技术框架:整体框架包含以下几个主要模块:1) 语音识别模块,将语音指令转换为文本;2) LLM指令解析模块,利用LLM理解文本指令的含义,提取关键信息,并生成结构化的语义表示;3) 知识库查询模块,根据语义表示查询数据库,获取相关知识;4) 决策模块,综合指令含义和知识库信息,生成机器人执行的动作指令;5) 机器人控制模块,执行动作指令,完成用户请求。
关键创新:最重要的技术创新点在于将LLM与数据库无缝集成,使得机器人能够利用外部知识来增强指令理解和决策能力。与传统方法相比,该方法不再依赖于预定义的规则或模板,而是通过LLM的强大泛化能力来处理各种复杂的语音指令。
关键设计:论文中可能涉及的关键设计包括:1) 如何设计合适的prompt,引导LLM准确解析语音指令;2) 如何构建和维护知识库,确保知识的准确性和完整性;3) 如何优化数据库查询效率,保证实时响应;4) 如何设计决策模块,平衡指令含义和知识库信息,做出最优决策。具体的参数设置、损失函数、网络结构等技术细节未知,需要查阅原文。
🖼️ 关键图片


📊 实验亮点
由于未提供具体的实验数据,无法总结实验亮点。但可以推测,实验可能对比了基于LLM的语音指令理解方法与传统方法的性能,指标可能包括指令理解准确率、任务完成率、响应时间等。预期基于LLM的方法在处理复杂指令和模糊指令时,能够取得显著的性能提升。
🎯 应用场景
该研究成果可广泛应用于各种机器人应用场景,例如:养老院的助老机器人、医院的护理机器人、工厂的自动化生产线、家庭服务机器人等。通过提升机器人对语音指令的理解能力和知识获取能力,可以显著提高人机交互的效率和机器人的智能化水平,从而更好地服务于人类社会。
📄 摘要(原文)
Robots are increasingly common in industry and daily life, such as in nursing homes where they can assist staff. A key challenge is developing intuitive interfaces for easy communication. The use of Large Language Models (LLMs) like GPT-4 has enhanced robot capabilities, allowing for real-time interaction and decision-making. This integration improves robots' adaptability and functionality. This project focuses on merging LLMs with databases to improve decision-making and enable knowledge acquisition for request interpretation problems.