Adaptive Robot Detumbling of a Non-Rigid Satellite
作者: Longsen Gao, Claus Danielson, Rafael Fierro
分类: cs.RO
发布日期: 2024-07-24 (更新: 2024-09-15)
备注: This paper has been accepted by the 63rd IEEE Conference on Decision and Control(CDC2024) as a regular paper
💡 一句话要点
提出一种自适应机器人解旋方法,用于稳定具有未知柔性动力学的非刚性卫星。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自适应控制 机器人解旋 非刚性卫星 空间机器人 柔性动力学
📋 核心要点
- 现有卫星解旋方法通常假设卫星为刚体,忽略了柔性结构带来的动力学不确定性,导致控制性能下降。
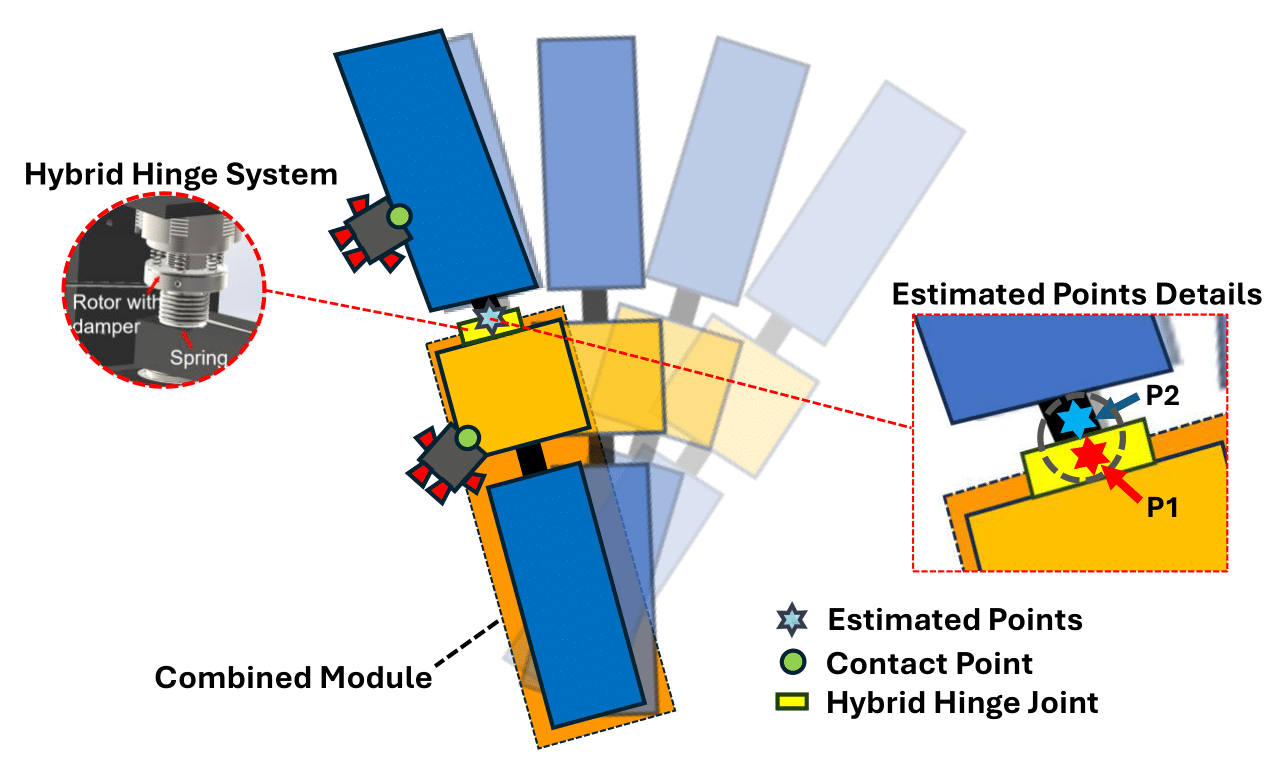
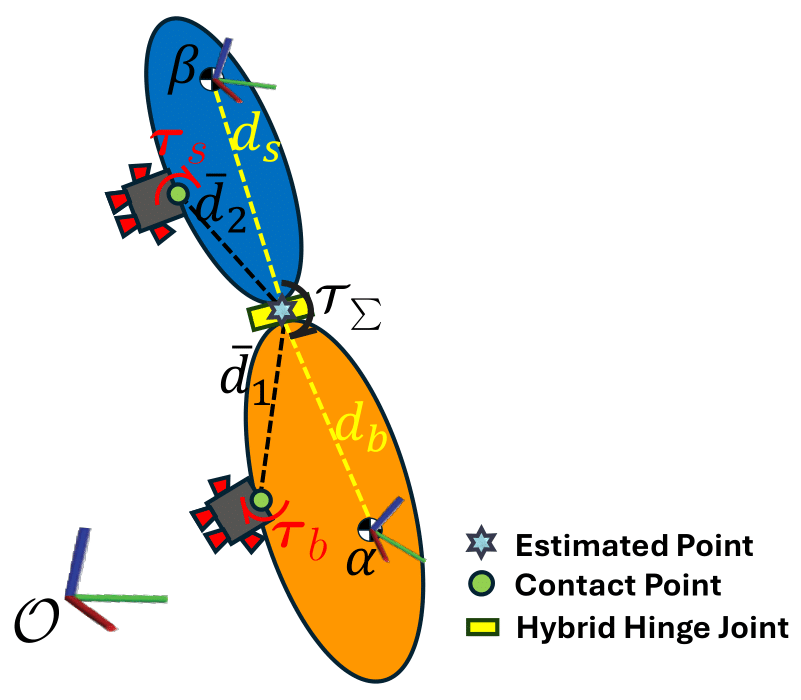
- 该论文提出将非刚性卫星建模为具有未知刚度和阻尼的两连杆串联链,并设计自适应控制器。
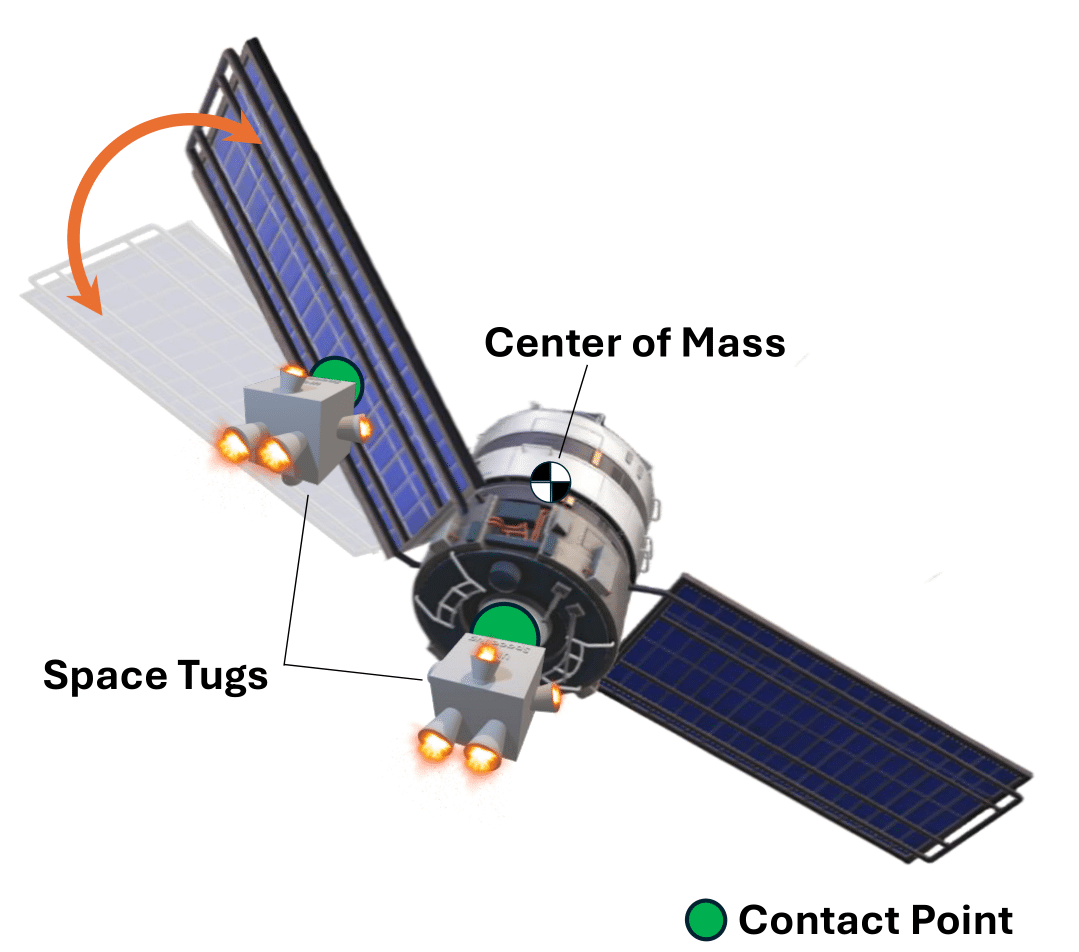
- 使用两个空间拖船作为服务者,在卫星参数未知的情况下,实现对非刚性卫星的稳定解旋控制。
📝 摘要(中文)
卫星稳定,特别是具有不确定柔性动力学的卫星稳定,已成为控制和机器人领域一个紧迫的问题。这些不确定性,尤其是第三方客户卫星的动力学,极大地复杂化了稳定任务。本文提出了一种新颖的自适应解旋方法,用于处理具有未知运动动力学(平动和转动)的非刚性卫星。我们方法的独特之处在于,我们将非刚性翻滚卫星建模为具有未知刚度和阻尼的两连杆串联链,这与先前将卫星视为刚体的解旋研究工作形成对比。我们开发了一种新颖的自适应机器人方法,通过使用两个空间拖船作为服务者来解旋卫星,尽管捕获后的动力学存在不确定性。值得注意的是,刚度特性和其他物理参数,包括两个连杆的质量和惯性,对于服务者来说仍然是未知的。我们提出的方法解决了在解旋任务中的挑战,并为高级操作具有不确定动力学的非刚性卫星铺平了道路。
🔬 方法详解
问题定义:现有卫星解旋方法通常将卫星简化为刚体模型,忽略了卫星的柔性特性。然而,实际卫星往往具有柔性结构,其动力学特性(如刚度和阻尼)难以精确建模。这种模型误差会导致控制性能下降,甚至导致控制系统不稳定。因此,如何对具有未知柔性动力学的非刚性卫星进行有效解旋是一个重要的挑战。
核心思路:该论文的核心思路是将非刚性卫星建模为一个两连杆串联链,其中连杆的刚度和阻尼是未知的。然后,利用自适应控制理论,设计一个控制器,该控制器能够在线估计卫星的动力学参数,并根据估计结果调整控制策略,从而实现对卫星的稳定解旋。这种方法的关键在于,它不需要预先知道卫星的精确动力学模型,而是通过在线学习的方式来适应卫星的未知特性。
技术框架:该方法的技术框架主要包括以下几个步骤:1) 建立非刚性卫星的两连杆串联链模型;2) 设计自适应控制器,该控制器包含参数估计器和控制律;3) 利用两个空间拖船作为服务者,通过施加力矩来控制卫星的运动;4) 通过实验或仿真验证控制器的性能。参数估计器用于在线估计卫星的动力学参数,控制律用于根据估计的参数计算控制力矩。
关键创新:该论文最重要的技术创新点在于,它提出了一种新的自适应控制方法,用于处理具有未知柔性动力学的非刚性卫星。与传统的刚体模型方法相比,该方法能够更好地适应卫星的未知特性,从而实现更稳定、更精确的解旋控制。此外,该方法还利用了两个空间拖船作为服务者,通过协同控制来实现对卫星的精确操作。
关键设计:自适应控制器的设计是该方法的关键。具体来说,参数估计器通常采用梯度下降法或最小二乘法等方法来在线估计卫星的动力学参数。控制律的设计需要考虑卫星的非线性动力学特性,并采用合适的控制策略,如反步法、滑模控制等。此外,还需要对控制器的参数进行仔细调整,以保证控制系统的稳定性和鲁棒性。
🖼️ 关键图片
📊 实验亮点
该论文提出了一种新颖的自适应解旋方法,能够有效地处理具有未知柔性动力学的非刚性卫星。与传统的刚体模型方法相比,该方法能够更好地适应卫星的未知特性,从而实现更稳定、更精确的解旋控制。虽然论文中没有给出具体的性能数据,但其提出的自适应控制框架为解决此类问题提供了一个新的思路。
🎯 应用场景
该研究成果可应用于空间碎片清理、在轨服务、以及深空探测等领域。通过对失效卫星进行捕获和解旋,可以有效减少空间碎片,保障航天器的安全运行。此外,该技术还可以用于在轨维修、燃料加注等任务,延长卫星的使用寿命。在深空探测中,该技术可以用于控制探测器的姿态,提高探测的精度和效率。
📄 摘要(原文)
The challenge of satellite stabilization, particularly those with uncertain flexible dynamics, has become a pressing concern in control and robotics. These uncertainties, especially the dynamics of a third-party client satellite, significantly complicate the stabilization task. This paper introduces a novel adaptive detumbling method to handle non-rigid satellites with unknown motion dynamics (translation and rotation). The distinctive feature of our approach is that we model the non-rigid tumbling satellite as a two-link serial chain with unknown stiffness and damping in contrast to previous detumbling research works which consider the satellite a rigid body. We develop a novel adaptive robotics approach to detumble the satellite by using two space tugs as servicer despite the uncertain dynamics in the post-capture case. Notably, the stiffness properties and other physical parameters, including the mass and inertia of the two links, remain unknown to the servicer. Our proposed method addresses the challenges in detumbling tasks and paves the way for advanced manipulation of non-rigid satellites with uncertain dynamics.