Fin ray-inspired, Origami, Small Scale Actuator for Fin Manipulation in Aquatic Bioinspired Robots
作者: Minh Vu, Revathy Ravuri, Angus Muir, Charles Mackie, Andrew Weightman, Simon Watson, Tim J. Echtermeyer
分类: cs.RO
发布日期: 2024-07-23
备注: 33 pages, 8 figures
💡 一句话要点
提出一种受鱼鳍启发的折纸小型驱动器,用于水生仿生机器人鳍片操控
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 仿生机器人 鱼鳍驱动 折纸结构 电磁驱动 水下推进
📋 核心要点
- 现有技术难以复制生物鱼鳍鳍条的性能和运动学特性,工程实现具有挑战性。
- 论文提出了一种受鱼鳍启发的折纸电磁腱驱动(FOLD)驱动器,模拟鱼鳍的动态功能。
- 实验验证了该驱动器在仿生机器人中的应用潜力,并进行了运动学和游泳参数的深入研究。
📝 摘要(中文)
本研究提出了一种受鱼鳍鳍条启发的折纸电磁腱驱动(FOLD)驱动器原型,旨在模拟鱼鳍鳍条的功能动态。该驱动器采用折纸/剪纸和纸张连接技术,由激光切割的扁平聚丙烯薄膜制成,可在数分钟内完成构建,成本低廉(0.80英镑/1美元),组装简单,且耐用性超过一百万次循环。我们利用其小尺寸,将八个驱动器嵌入到一个135毫米长的乌贼机器人的两个鳍膜中,使其能够进行四个自由度的游泳。我们进行了广泛的运动学和游泳参数研究,包含来自7.6小时视频的1015个数据点,用于确定最佳运动学参数并验证水生动物中观察到的理论常数。值得注意的是,该研究探索了波动模式、功率分配和运动效率之间的细微相互作用,突出了该驱动器作为研究节能推进和仿生系统控制的模型系统的潜力。该驱动器的多功能性还通过将其集成到鱼和水母中得到进一步证明。
🔬 方法详解
问题定义:现有技术难以在工程上复制鱼鳍鳍条的复杂运动和功能,尤其是在小型水生机器人中实现精确的鳍片操控。传统的驱动方式通常体积较大、成本较高,且难以实现生物鳍条的灵活性和适应性。因此,需要一种小型化、低成本、高耐用性的驱动器,能够精确控制鳍片的运动,从而实现高效的水下推进。
核心思路:该论文的核心思路是借鉴鱼鳍鳍条的生物结构和运动方式,利用折纸/剪纸技术设计一种新型的电磁腱驱动器。通过巧妙的结构设计,将扁平材料折叠成具有复杂运动能力的驱动器,从而实现对鳍片的精确控制。这种设计思路能够有效降低驱动器的体积和成本,同时提高其灵活性和耐用性。
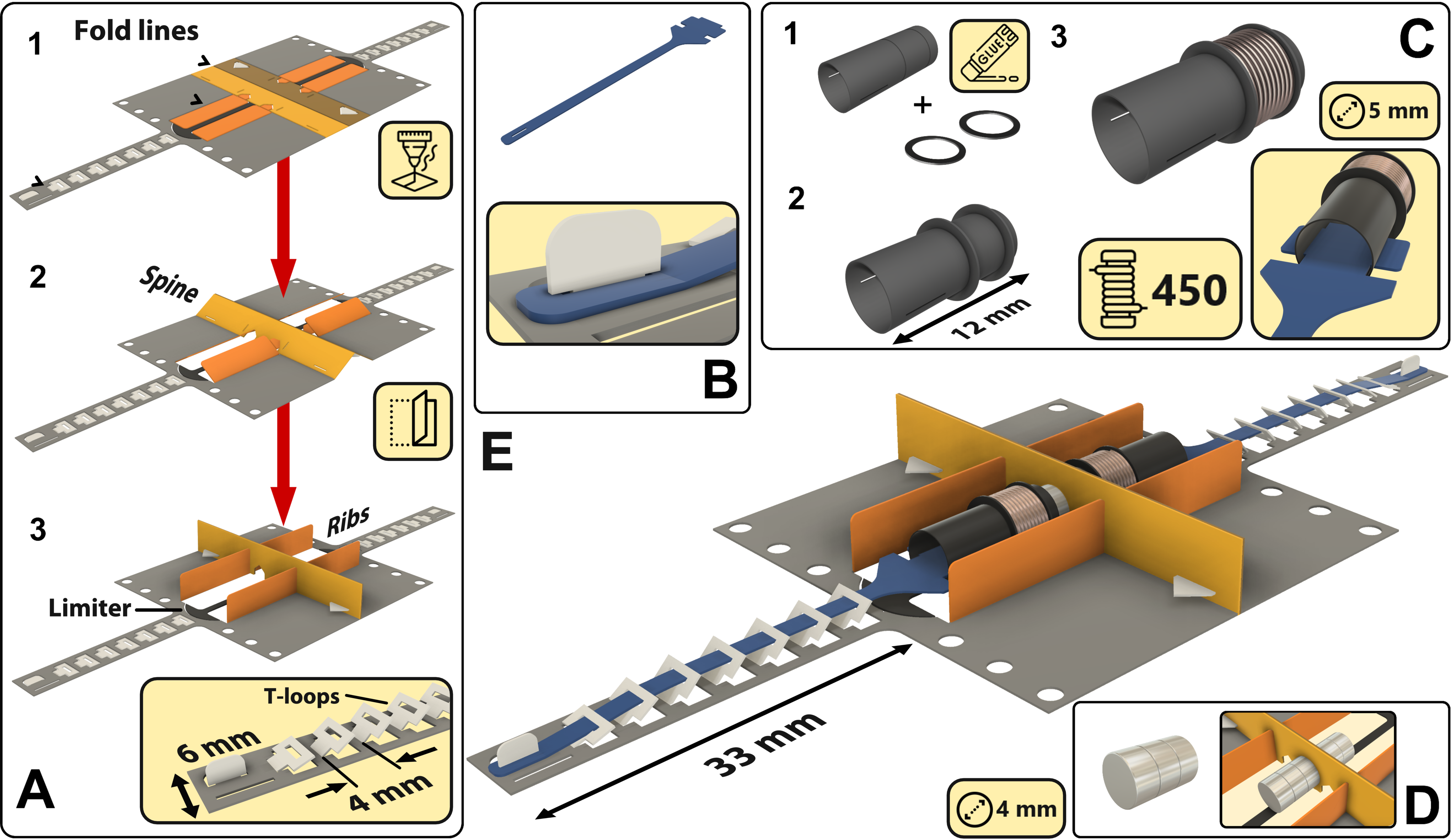
技术框架:该驱动器的整体架构包括以下几个主要部分:1) 激光切割的聚丙烯薄膜,作为驱动器的主要材料;2) 折纸/剪纸结构,赋予驱动器特定的运动能力;3) 电磁腱驱动系统,通过控制腱的张力来实现驱动器的运动;4) 控制系统,用于控制电磁腱驱动系统的运动,从而实现对鳍片的精确控制。整个流程是从设计折纸结构开始,然后进行激光切割和组装,最后集成电磁腱驱动系统和控制系统。
关键创新:该论文最重要的技术创新点在于将折纸/剪纸技术与电磁腱驱动系统相结合,设计出一种小型化、低成本、高耐用性的驱动器。与传统的驱动方式相比,该驱动器具有体积小、重量轻、成本低、易于组装和维护等优点。此外,该驱动器的运动方式更加灵活,能够更好地模拟生物鳍条的运动,从而提高水生机器人的推进效率。
关键设计:该驱动器的关键设计包括:1) 折纸结构的几何参数,这些参数决定了驱动器的运动范围和灵活性;2) 电磁腱驱动系统的参数,包括电磁铁的尺寸、线圈的匝数、腱的材料和张力等;3) 控制系统的算法,用于控制电磁腱驱动系统的运动,从而实现对鳍片的精确控制。论文中通过实验优化了这些参数,以实现最佳的驱动性能。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该驱动器具有良好的运动性能和耐用性,能够实现对鳍片的精确控制。通过对135毫米长的乌贼机器人进行运动学和游泳参数研究,获得了1015个数据点,验证了该驱动器的有效性。实验还探索了波动模式、功率分配和运动效率之间的关系,为优化水下机器人的推进效率提供了依据。该驱动器已成功集成到鱼和水母模型中,进一步证明了其多功能性。
🎯 应用场景
该研究成果可应用于水下机器人、水下探测、水下救援等领域。该驱动器的小型化和灵活性使其能够应用于小型水下机器人,执行复杂的任务。其低成本和高耐用性使其能够应用于大规模的水下探测和监测。此外,该驱动器还可以作为研究生物推进机制的模型系统,为未来的水下机器人设计提供新的思路。
📄 摘要(原文)
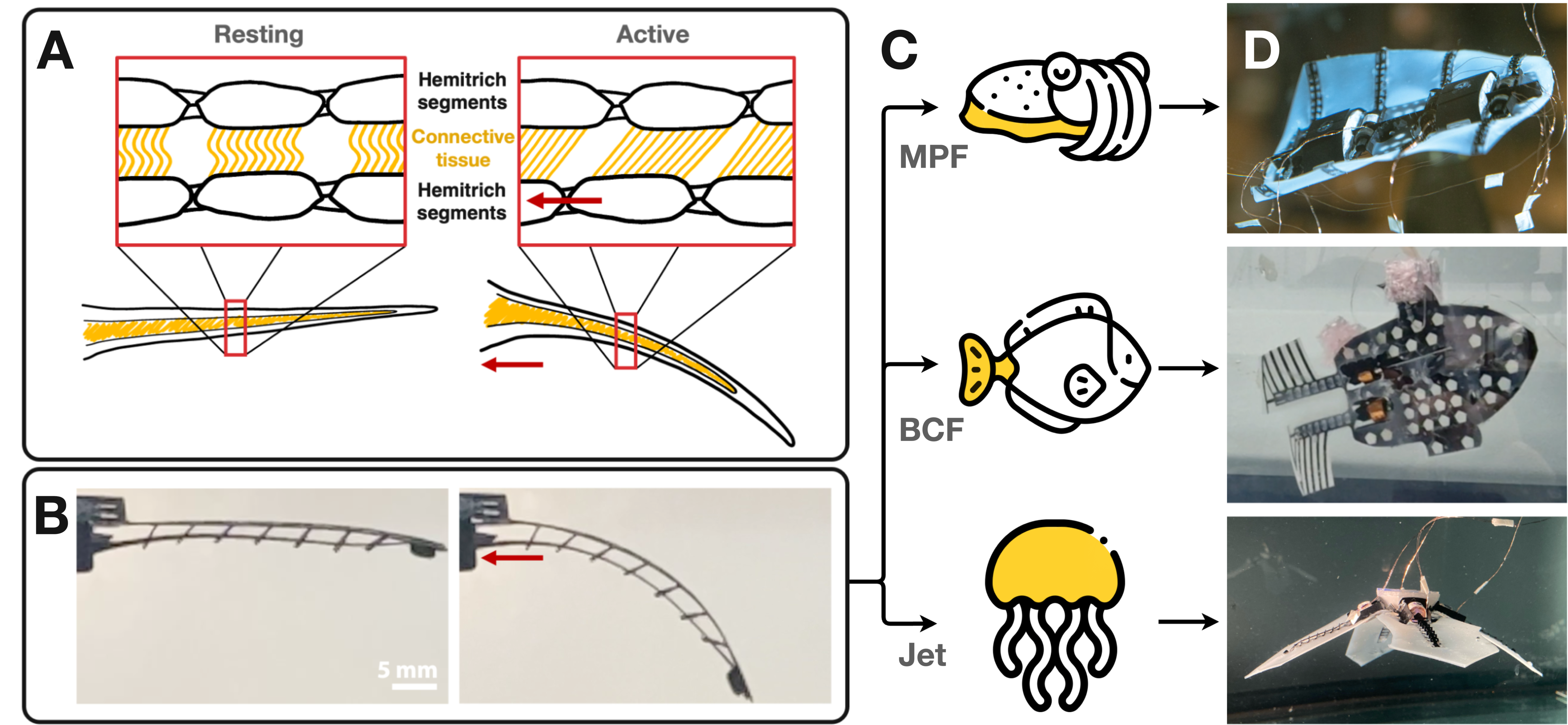
Fish locomotion is enabled by fin rays-actively deformable boney rods, which manipulate the fin to facilitate complex interaction with surrounding water and enable propulsion. Replicating the performance and kinematics of the biological fin ray from an engineering perspective is a challenging task and has not been realised thus far. This work introduces a prototype of a fin ray-inspired origami electromagnetic tendon-driven (FOLD) actuator, designed to emulate the functional dynamics of fish fin rays. Constructed in minutes using origami/kirigami and paper joinery techniques from flat laser-cut polypropylene film, this actuator is low-cost at £0.80 (\$1), simple to assemble, and durable for over one million cycles. We leverage its small size to embed eight into two fin membranes of a 135 mm long cuttlefish robot capable of four degrees of freedom swimming. We present an extensive kinematic and swimming parametric study with 1015 data points from 7.6 hours of video, which has been used to determine optimal kinematic parameters and validate theoretical constants observed in aquatic animals. Notably, the study explores the nuanced interplay between undulation patterns, power distribution, and locomotion efficiency, underscoring the potential of the actuator as a model system for the investigation of energy-efficient propulsion and control of bioinspired systems. The versatility of the actuator is further demonstrated by its integration into a fish and a jellyfish.