Neuromuscular Modeling for Locomotion with Wearable Assistive Robots -- A primer
作者: Mohamed Irfan Refai, Huawei Wang, Antonio Gogeascoechea, Rafael Ornelas Kobayashi, Lucas A. Gaudio, Federica Damonte, Guillaume Durandau, Herman van der Kooij, Utku S. Yavuz, Massimo Sartori
分类: cs.RO
发布日期: 2024-07-19
💡 一句话要点
综述穿戴式辅助机器人步态控制的神经肌肉建模方法,促进神经生理学与生物机电工程的交叉。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 穿戴式机器人 神经肌肉建模 步态控制 神经力学 生物机电工程
📋 核心要点
- 现有穿戴式辅助机器人步态控制缺乏对人体神经肌肉骨骼系统精确建模,导致控制不直观且泛化性差。
- 本文旨在通过综述运动神经力学、神经力学模型和现有神经力学控制器,为神经生理学家和生物机电工程师搭建桥梁。
- 论文概述了该领域的重要研究,旨在促进神经生理学和生物机电工程的合作,推动穿戴式机器人步态辅助的未来发展。
📝 摘要(中文)
本文档全面介绍了下肢穿戴式辅助机器人(WR)领域,该领域在文献中已有大量记载。虽然已经设计了各种接口来控制步态和平衡活动中的这些设备,但实现无缝和直观的控制需要对人体神经肌肉骨骼(NMSK)系统进行精确建模。这种建模使WR能够预测用户的意图并确定必要的关节辅助。尽管存在与NMSK系统连接的控制器,但在不同任务中,稳健且通用的技术仍然稀缺。设计这些新型控制器需要神经生理学家(他们了解运动启动和产生的生理学)和生物机电工程师(他们设计和控制辅助运动的设备)的综合专业知识。本文旨在通过介绍每个领域的关键概念和当前科学状况的基础知识,来弥合这些领域之间的差距。我们提出了三个主要部分:运动的神经力学、运动的神经力学模型以及WR中使用的现有神经力学控制器。通过这些部分,我们全面概述了该领域的开创性研究,从而促进了神经生理学家和生物机电工程师之间的合作,以促进步态穿戴式机器人的未来发展。
🔬 方法详解
问题定义:目前穿戴式辅助机器人在步态控制方面面临的挑战是,缺乏对人体神经肌肉骨骼系统(NMSK)的精确建模。这导致机器人难以准确预测用户的运动意图,从而影响控制的流畅性和直观性。现有控制器在不同任务中的泛化能力较弱,难以适应复杂多变的运动场景。
核心思路:本文的核心思路是通过整合神经生理学和生物机电工程的知识,建立更精确的NMSK模型,从而实现对用户运动意图的准确预测和个性化辅助。这需要深入理解运动的神经机制,并将其转化为可用于机器人控制的数学模型。
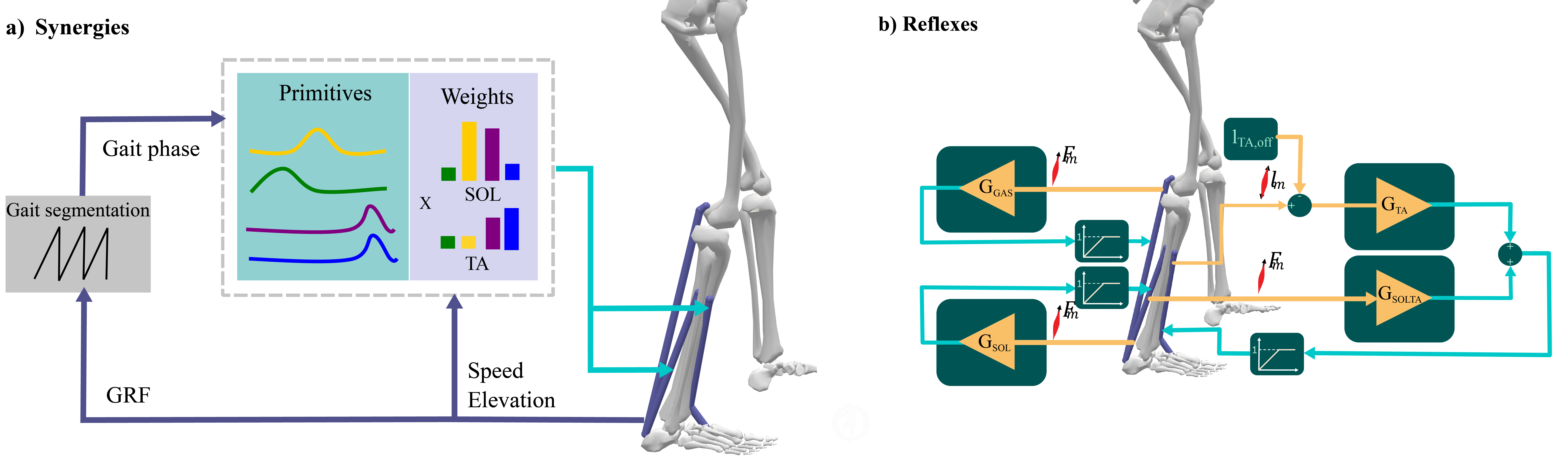
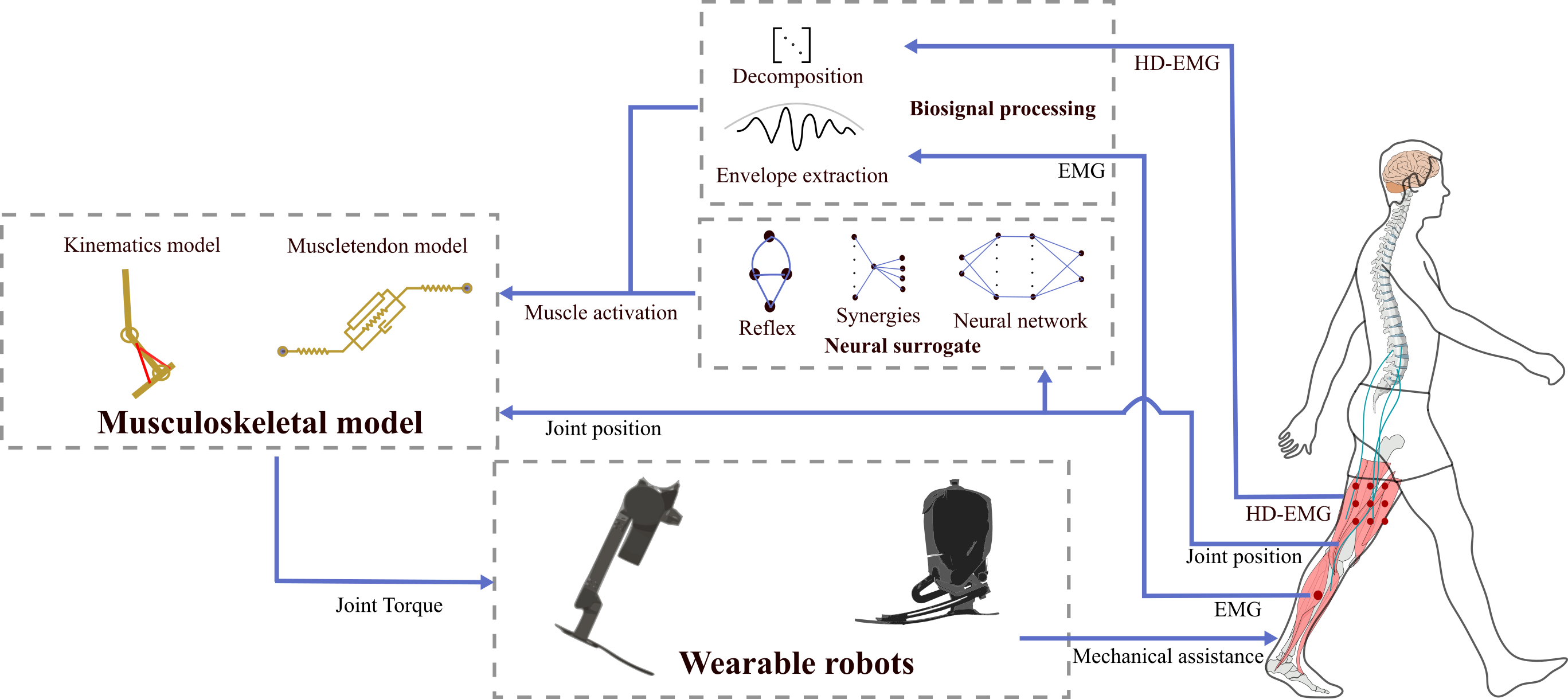
技术框架:本文主要分为三个部分:首先,回顾了运动的神经力学基础,包括肌肉的激活、神经信号的传递等。其次,介绍了用于描述人体运动的神经力学模型,例如基于肌肉协同的控制模型。最后,综述了现有穿戴式辅助机器人中使用的神经力学控制器,分析了它们的优缺点。
关键创新:本文的关键创新在于其综述性质,它并非提出一种全新的算法或模型,而是系统地整理了神经生理学和生物机电工程领域的相关知识,旨在促进这两个领域的交叉融合,为未来的研究提供指导。
关键设计:本文作为一篇综述性文章,并没有涉及具体的参数设置或网络结构设计。它主要关注于对现有模型的总结和分析,为未来的模型设计提供理论基础。未来的研究可以基于本文提出的框架,设计更精确的NMSK模型,并开发更智能的控制算法。
🖼️ 关键图片

📊 实验亮点
本文重点在于对现有研究的系统性总结和分析,而非实验结果的展示。其亮点在于整合了神经生理学和生物机电工程的知识,为未来的研究方向提供了清晰的指导。通过对现有神经力学模型的优缺点进行分析,为开发更先进的穿戴式辅助机器人奠定了基础。
🎯 应用场景
该研究成果可应用于开发更智能、更个性化的穿戴式辅助机器人,帮助行动不便的人群恢复或增强运动能力。例如,可以用于中风患者的康复训练、老年人的步态辅助,以及提高运动员的运动表现。此外,该研究也有助于开发更自然的人机交互界面,实现人与机器人之间的无缝协作。
📄 摘要(原文)
Wearable assistive robots (WR) for the lower extremity are extensively documented in literature. Various interfaces have been designed to control these devices during gait and balance activities. However, achieving seamless and intuitive control requires accurate modeling of the human neuromusculoskeletal (NMSK) system. Such modeling enables WR to anticipate user intentions and determine the necessary joint assistance. Despite the existence of controllers interfacing with the NMSK system, robust and generalizable techniques across different tasks remain scarce. Designing these novel controllers necessitates the combined expertise of neurophysiologists, who understand the physiology of movement initiation and generation, and biomechatronic engineers, who design and control devices that assist movement. This paper aims to bridge the gaps between these fields by presenting a primer on key concepts and the current state of the science in each area. We present three main sections: the neuromechanics of locomotion, neuromechanical models of movement, and existing neuromechanical controllers used in WR. Through these sections, we provide a comprehensive overview of seminal studies in the field, facilitating collaboration between neurophysiologists and biomechatronic engineers for future advances in wearable robotics for locomotion.