A New Tightly-Coupled Dual-VIO for a Mobile Manipulator With Dynamic Locomotion
作者: Jianxiang Xu, Soo Jeon
分类: cs.RO
发布日期: 2024-07-18
备注: 8 pages
期刊: IEEE/ASME Transactions on Mechatronics (2024)
DOI: 10.1109/TMECH.2024.3400918
💡 一句话要点
提出一种新的紧耦合双目VIO,用于动态运动的移动机械臂
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 移动机械臂 视觉惯性里程计 VIO 紧耦合 动态运动
📋 核心要点
- 现有移动机械臂在动态运动中,由于基座和机械臂的耦合运动,导致视觉惯性里程计(VIO)估计精度下降。
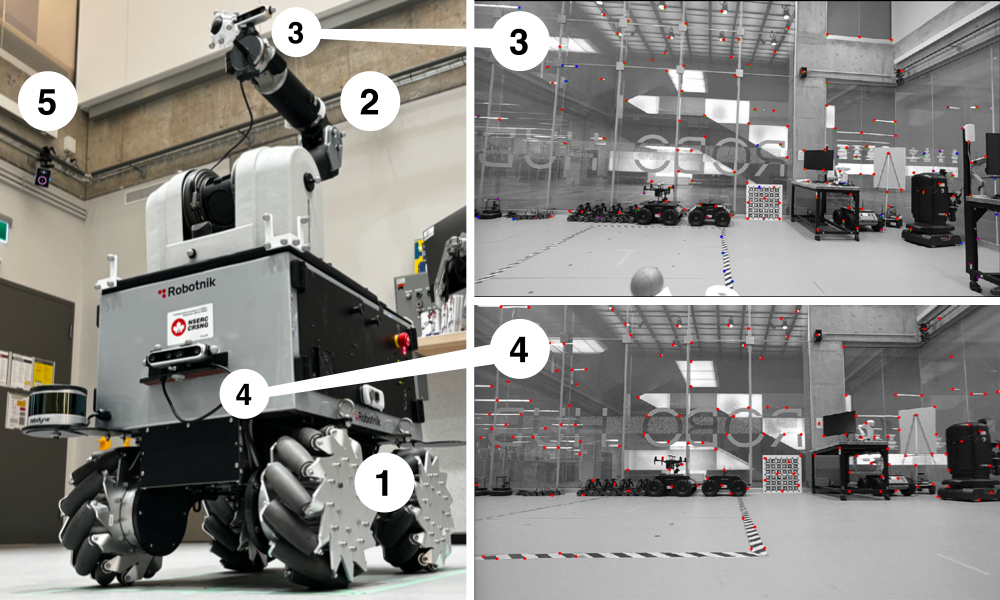
- 该方法提出一种双VIO架构,分别在基座和末端执行器上运行独立的单目VIO,并通过手臂运动学进行紧耦合。
- 实验结果表明,该方法能够有效提高移动机械臂在动态运动中的定位精度,并为主动SLAM提供新的思路。
📝 摘要(中文)
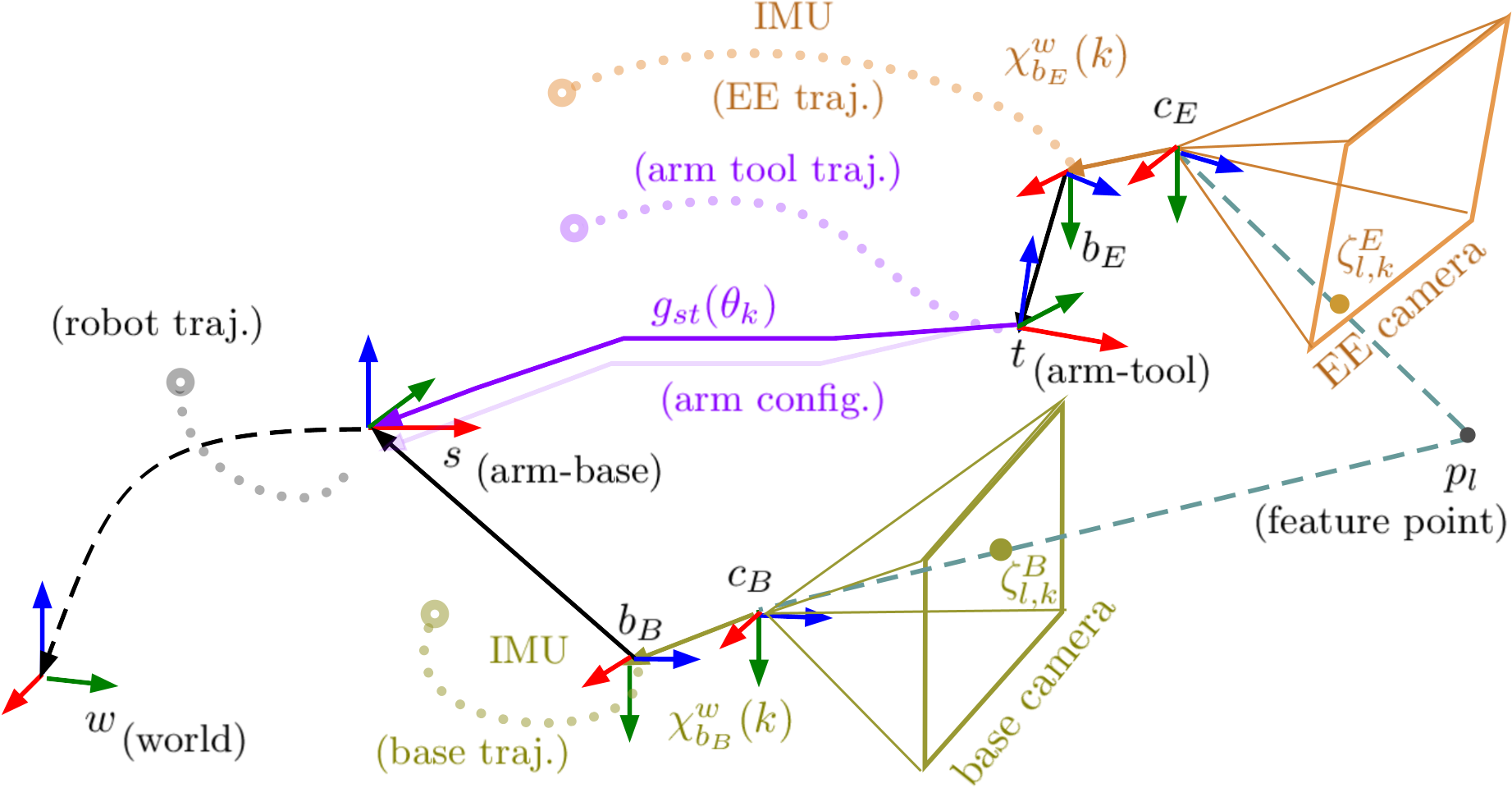
本文提出了一种新的双目视觉惯性里程计(dual-VIO)策略,用于在动态运动下运行的移动机械臂,即涉及基座平台和机械臂的协调运动。该方法旨在解决移动机械臂在复杂环境中进行动态运动时,由于耦合激励导致估计不准确的问题。该技术维护两个独立的单目VIO模块,一个位于移动基座上,另一个位于末端执行器(EE)上,并在因子图的底层进行紧耦合。所提出的方法将每个单目VIO视为相对于彼此的位置锚点,通过手臂运动学进行约束。这些锚点在VIO位姿优化期间提供软几何约束,从而在高度动态运动中稳定两个估计器。通过大量的实验测试,验证了该方法的性能,并与并行运行的双VINS-Mono进行了比较。我们设想,该方法还可以为主动SLAM(ASLAM)提供基础,为多VIO融合和系统冗余提供新的视角。
🔬 方法详解
问题定义:移动机械臂在动态运动时,基座和机械臂的耦合运动会产生复杂的激励,导致传统的单VIO系统难以准确估计位姿。现有的方法难以有效处理这种耦合激励带来的不确定性,从而影响了定位精度和鲁棒性。
核心思路:该论文的核心思路是采用双VIO架构,分别在移动基座和末端执行器上运行独立的单目VIO。通过将两个VIO模块进行紧耦合,利用手臂运动学关系作为软约束,从而提高整体的定位精度和鲁棒性。这种方法能够更好地处理耦合激励带来的不确定性,并实现更稳定的位姿估计。
技术框架:该方法包含两个主要的单目VIO模块,分别位于移动基座和末端执行器上。这两个VIO模块独立运行,并输出各自的位姿估计。然后,通过手臂运动学模型,将两个VIO模块的位姿估计进行关联,形成一个紧耦合的因子图。最后,通过优化因子图,得到最终的位姿估计结果。
关键创新:该方法最重要的创新点在于提出了双VIO的紧耦合架构,利用手臂运动学关系作为软约束。与传统的单VIO系统相比,该方法能够更好地处理耦合激励带来的不确定性,并提高定位精度和鲁棒性。与并行运行多个VIO系统相比,该方法通过紧耦合的方式,能够更有效地利用系统冗余信息。
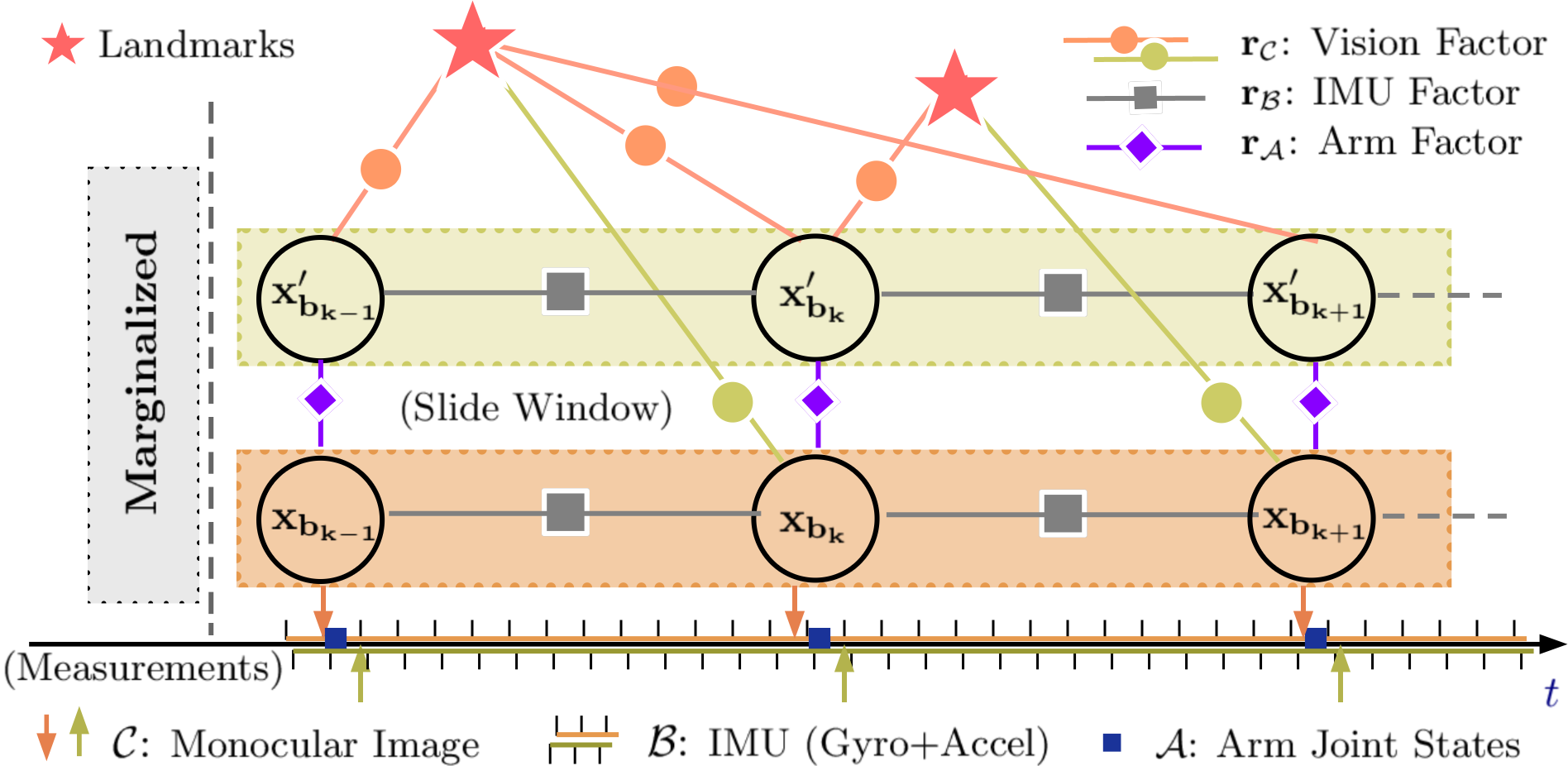
关键设计:该方法的关键设计在于如何将两个VIO模块进行紧耦合。论文中采用因子图的方式,将两个VIO模块的位姿估计、IMU测量值和手臂运动学关系都表示为因子,并通过优化因子图来得到最终的位姿估计结果。手臂运动学关系被建模为软约束,允许一定的误差,从而提高系统的鲁棒性。具体的参数设置和损失函数在论文中没有详细描述,属于未知信息。
🖼️ 关键图片
📊 实验亮点
论文通过实验验证了所提出方法的有效性。实验结果表明,与并行运行的双VINS-Mono相比,该方法能够显著提高移动机械臂在动态运动中的定位精度。具体的性能数据和提升幅度在摘要和论文中没有明确给出,属于未知信息。实验结果表明该方法在动态环境中具有更好的鲁棒性。
🎯 应用场景
该研究成果可应用于各种需要高精度定位的移动机械臂应用场景,例如:复杂环境下的自主导航、精细操作、移动操作平台等。通过提高移动机械臂的定位精度和鲁棒性,可以实现更安全、更高效的自动化作业,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
This paper introduces a new dual monocular visualinertial odometry (dual-VIO) strategy for a mobile manipulator operating under dynamic locomotion, i.e. coordinated movement involving both the base platform and the manipulator arm. Our approach has been motivated by challenges arising from inaccurate estimation due to coupled excitation when the mobile manipulator is engaged in dynamic locomotion in cluttered environments. The technique maintains two independent monocular VIO modules, with one at the mobile base and the other at the end-effector (EE), which are tightly coupled at the low level of the factor graph. The proposed method treats each monocular VIO with respect to each other as a positional anchor through arm-kinematics. These anchor points provide a soft geometric constraint during the VIO pose optimization. This allows us to stabilize both estimators in case of instability of one estimator in highly dynamic locomotions. The performance of our approach has been demonstrated through extensive experimental testing with a mobile manipulator tested in comparison to running dual VINS-Mono in parallel. We envision that our method can also provide a foundation towards active-SLAM (ASLAM) with a new perspective on multi-VIO fusion and system redundancy.