Pushing the Limits of Reactive Planning: Learning to Escape Local Minima
作者: Isar Meijer, Michael Pantic, Helen Oleynikova, Roland Siegwart
分类: cs.RO
发布日期: 2024-07-18
💡 一句话要点
提出基于学习的反应式规划方法,提升机器人逃离局部极小值能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 反应式规划 局部极小值 神经网络 机器人导航 零样本迁移
📋 核心要点
- 反应式规划器速度快但易陷入局部极小值,而全局规划器计算成本高。如何结合二者优势是一个挑战。
- 论文提出利用神经网络学习几何直觉,增强反应式规划器逃离局部极小值的能力,无需显式地图。
- 实验表明,该方法在真实3D环境中具有良好的零样本迁移能力,且对传感器噪声具有鲁棒性。
📝 摘要(中文)
本文研究了如何增强纯粹的基于传感器的反应式规划器,使其具备逃离局部极小值的几何直觉,从而弥补完全反应式方法和基于地图的路径规划器之间的差距。作者探索了前馈和循环神经网络来增强反应式规划器。该系统在大量由基本形状自动生成的极度杂乱环境中进行训练,并展示了零样本迁移到真实3D人工环境的能力,并且在高达30%的传感器噪声下性能没有下降。此外,论文还讨论了网络记忆在最终系统中的作用,以及关于反应式导航与基于地图导航本质的见解。
🔬 方法详解
问题定义:反应式规划器依赖当前传感器数据和局部信息,虽然速度快,但在复杂环境中容易陷入局部极小值,导致导航失败。现有方法要么依赖全局地图,计算成本高,要么完全依赖局部信息,缺乏长远规划能力。因此,需要一种方法,在不依赖全局地图的情况下,使反应式规划器具备一定的“远见”,能够预测并避免局部极小值。
核心思路:论文的核心思路是利用神经网络学习环境的几何特征,从而赋予反应式规划器一定的“几何直觉”。通过学习,网络能够预测潜在的局部极小值,并指导规划器采取相应的行动,从而逃离这些区域。这种方法避免了显式构建地图,降低了计算复杂度,同时提升了规划器的鲁棒性。
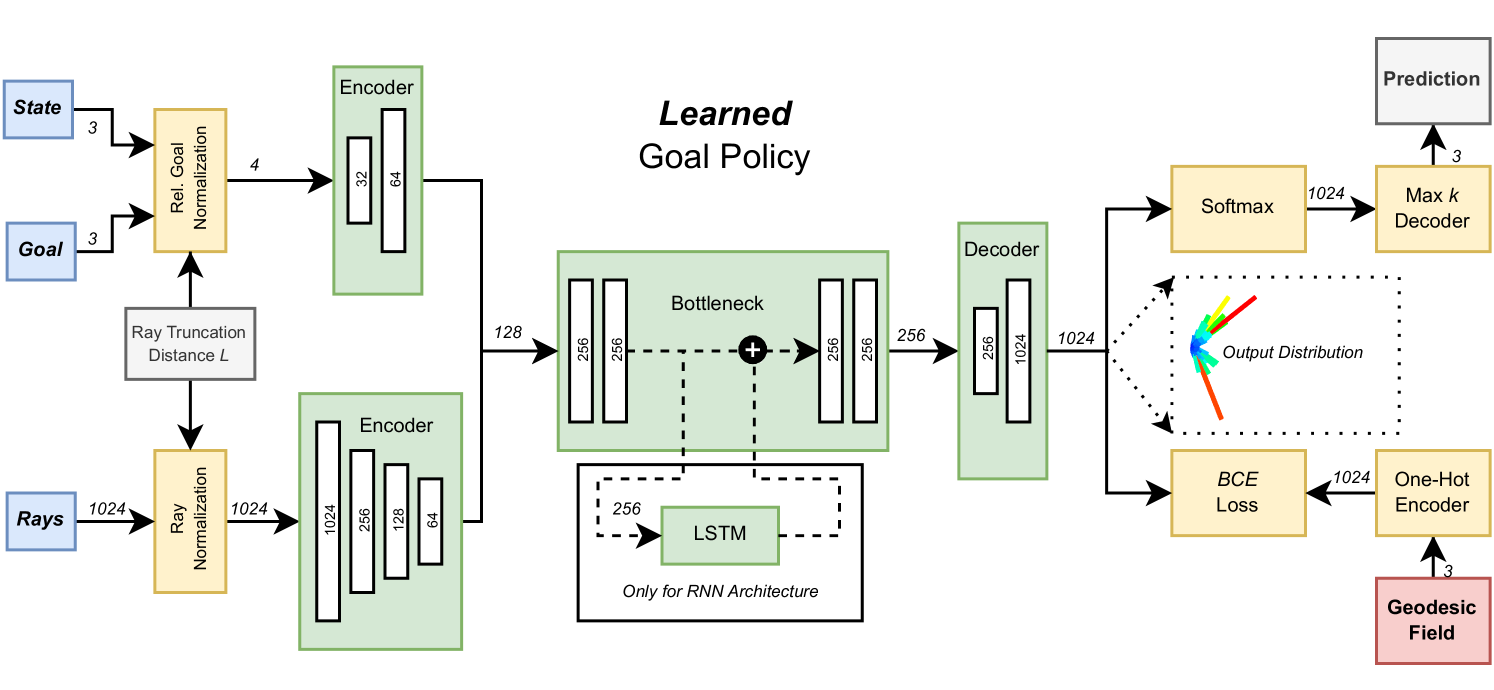
技术框架:整体框架包含一个反应式规划器和一个神经网络。反应式规划器根据当前传感器数据生成初步的运动指令,神经网络接收传感器数据和反应式规划器的输出作为输入,预测下一步的运动方向。神经网络的输出与反应式规划器的输出融合,生成最终的运动指令。训练过程在一个模拟环境中进行,该环境由大量随机生成的几何形状组成。
关键创新:最重要的创新点在于利用神经网络学习环境的几何特征,从而增强反应式规划器的全局规划能力,而无需显式地图。与传统的反应式规划器相比,该方法能够更好地处理复杂环境,避免陷入局部极小值。与基于地图的规划器相比,该方法计算复杂度更低,更适合实时应用。
关键设计:论文使用了前馈和循环神经网络两种结构。循环神经网络可以利用历史信息,更好地预测未来的状态。损失函数的设计目标是使神经网络的输出能够引导机器人逃离局部极小值。具体的参数设置和网络结构在论文中没有详细说明,属于未知信息。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该系统在真实3D人工环境中具有良好的零样本迁移能力,无需针对特定环境进行训练。此外,该系统在高达30%的传感器噪声下性能没有明显下降,表明其具有良好的鲁棒性。具体的性能指标和对比基线在论文中没有明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于各种机器人导航场景,尤其是在复杂、动态和未知的环境中,例如家庭服务机器人、仓库物流机器人、搜索救援机器人等。通过提升机器人自主导航能力,可以减少人工干预,提高工作效率和安全性。该方法还可以扩展到其他领域,例如自动驾驶、游戏AI等。
📄 摘要(原文)
When does a robot planner need a map? Reactive methods that use only the robot's current sensor data and local information are fast and flexible, but prone to getting stuck in local minima. Is there a middle-ground between fully reactive methods and map-based path planners? In this paper, we investigate feed forward and recurrent networks to augment a purely reactive sensor-based planner, which should give the robot geometric intuition about how to escape local minima. We train on a large number of extremely cluttered worlds auto-generated from primitive shapes, and show that our system zero-shot transfers to real 3D man-made environments, and can handle up to 30% sensor noise without degeneration of performance. We also offer a discussion of what role network memory plays in our final system, and what insights can be drawn about the nature of reactive vs. map-based navigation.