Tool Shape Optimization through Backpropagation of Neural Network
作者: Kento Kawaharazuka, Toru Ogawa, Cota Nabeshima
分类: cs.RO
发布日期: 2024-07-16
备注: Accepted at IROS2020
DOI: 10.1109/IROS45743.2020.9341583
💡 一句话要点
提出基于神经网络反向传播的工具形状优化方法,用于机器人工具使用。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 工具形状优化 机器人工具使用 深度神经网络 反向传播 物体操作
📋 核心要点
- 现有机器人工具使用方法在工具形状优化方面存在不足,难以根据任务自适应地选择或设计工具。
- 该方法利用深度神经网络模拟工具轨迹与任务状态转移之间的关系,并通过反向传播优化工具形状。
- 实验表明,该方法能够在二维物体操作任务中生成合适的工具形状,验证了其有效性。
📝 摘要(中文)
本文提出了一种针对机器人工具使用的工具形状优化方法。该方法旨在使机器人能够根据给定的任务,获得优化的工具形状、工具轨迹或两者兼有。其核心思想是利用深度神经网络来表示机器人沿特定轨迹移动特定工具时,任务状态的转移过程。该方法被应用于二维平面上的物体操作任务,实验结果验证了该方法能够生成合适的工具形状。
🔬 方法详解
问题定义:论文旨在解决机器人工具使用中工具形状的自动优化问题。现有方法通常依赖人工设计或预定义的工具库,难以适应复杂或新型任务的需求。痛点在于缺乏一种能够根据任务目标自动优化工具形状的通用方法。
核心思路:论文的核心思路是将工具形状优化问题转化为一个可微分的优化问题。通过建立工具轨迹、工具形状与任务状态转移之间的映射关系,并使用深度神经网络来学习这种映射关系,从而实现工具形状的优化。核心在于利用神经网络的反向传播能力,将任务目标的信息传递回工具形状的设计过程。
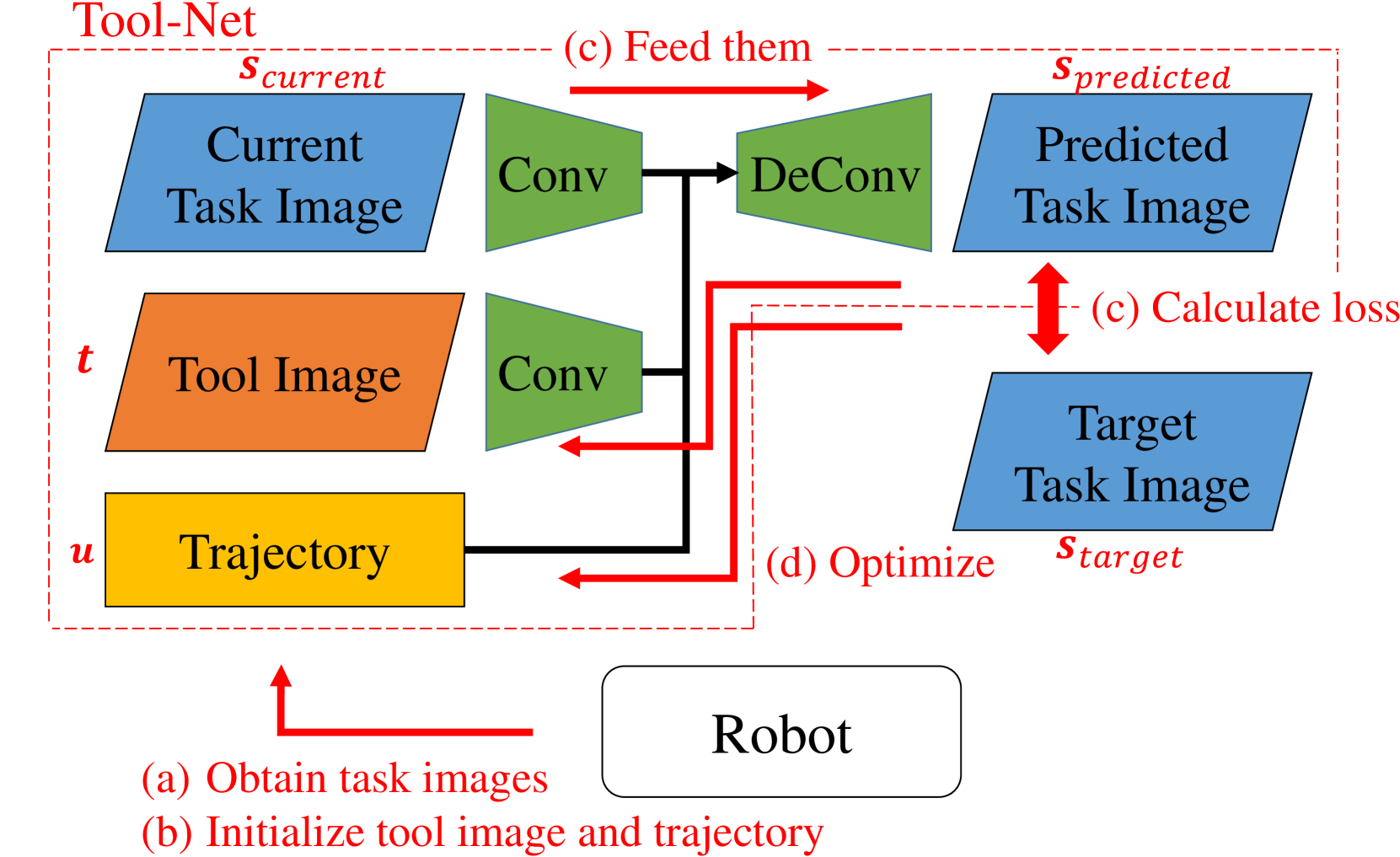
技术框架:整体框架包含以下几个主要步骤:1) 定义任务状态空间和动作空间;2) 使用深度神经网络建模工具轨迹和工具形状到任务状态转移的映射;3) 定义损失函数,衡量当前工具形状和轨迹下任务完成的程度;4) 使用反向传播算法,根据损失函数优化工具形状和轨迹。该框架允许同时优化工具形状和轨迹,或者只优化其中一个。
关键创新:最重要的技术创新点在于将深度学习中的反向传播算法应用于工具形状的优化。与传统的优化方法相比,该方法能够自动学习工具形状与任务之间的复杂关系,无需人工设计复杂的启发式规则。此外,该方法能够同时优化工具形状和轨迹,从而获得更好的性能。
关键设计:论文中,神经网络的输入包括工具形状和轨迹参数,输出是任务状态的转移。损失函数的设计需要根据具体的任务来确定,例如,可以是目标物体与期望位置之间的距离。网络结构的选择也需要根据任务的复杂程度来调整,可以使用卷积神经网络或循环神经网络等。
🖼️ 关键图片


📊 实验亮点
论文在二维平面上的物体操作任务中验证了所提出的方法。实验结果表明,该方法能够生成合适的工具形状,例如,能够生成用于抓取特定形状物体的工具。虽然论文没有给出具体的性能数据和对比基线,但实验结果验证了该方法在工具形状优化方面的有效性。
🎯 应用场景
该研究成果可应用于各种机器人工具使用场景,例如:自动化装配、医疗手术机器人、家庭服务机器人等。通过自动优化工具形状,可以提高机器人的工作效率、精度和适应性,降低人工干预的需求。未来,该方法有望扩展到三维空间和更复杂的任务中,实现更智能化的机器人工具使用。
📄 摘要(原文)
When executing a certain task, human beings can choose or make an appropriate tool to achieve the task. This research especially addresses the optimization of tool shape for robotic tool-use. We propose a method in which a robot obtains an optimized tool shape, tool trajectory, or both, depending on a given task. The feature of our method is that a transition of the task state when the robot moves a certain tool along a certain trajectory is represented by a deep neural network. We applied this method to object manipulation tasks on a 2D plane, and verified that appropriate tool shapes are generated by using this novel method.