Wheeled Humanoid Bilateral Teleoperation with Position-Force Control Modes for Dynamic Loco-Manipulation
作者: Amartya Purushottam, Jack Yan, Christopher Xu, Youngwoo Sim, Joao Ramos
分类: cs.RO
发布日期: 2024-07-16
💡 一句话要点
提出基于力位混合控制的轮式人形机器人遥操作方案,实现动态操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 遥操作 力位混合控制 动态操作 人机协作
📋 核心要点
- 现有方法难以使人形机器人完成复杂或危险的手动任务,尤其是在动态操作场景下,缺乏全身协调控制。
- 论文提出一种基于位置-力控制模式切换的遥操作策略,结合躯干姿态的运动映射和手臂的阻抗控制,实现全身协调。
- 实验证明,该方法能够使机器人完成重物放置和人机协作搬运等动态操作任务,验证了方案的有效性。
📝 摘要(中文)
本文提出了一种用于动态操作(DLM)的轮式人形机器人双边遥操作框架,该框架采用位置-力控制模式切换策略。通过遥操作员躯干的俯仰和偏航来控制机器人的位置或加速度。操作员的手臂运动被映射到机器人的手臂,以进行末端执行器的关节位置或阻抗控制。人机界面捕获遥操作员的运动,并向其躯干提供触觉反馈,从而增强他们对机器人与环境交互的感知。论文展示了两种形式的DLM:一是机器人将重型箱子(5-10.5公斤,高达机器人重量的83%)精确放置到目标位置;二是人机协作搬运物体,机器人和遥操作员分别担任领导者和跟随者的角色。
🔬 方法详解
问题定义:现有的人形机器人遥操作方法在动态操作(DLM)任务中面临挑战,尤其是在需要机器人与环境进行稳定接触和施加精确力的情况下。传统的遥操作方法可能无法很好地处理机器人全身的协调运动,以及操作员对机器人与环境交互的感知问题。现有方法难以实现力位混合控制,无法兼顾位置精度和力控制的需求。
核心思路:论文的核心思路是将操作员的运动意图映射到机器人的全身运动控制上,并结合位置和力控制模式的切换,来实现动态操作任务。通过操作员躯干的姿态来控制机器人的位置或加速度,通过操作员的手臂运动来控制机器人的末端执行器,从而实现全身的协调控制。同时,利用触觉反馈来增强操作员对机器人与环境交互的感知。
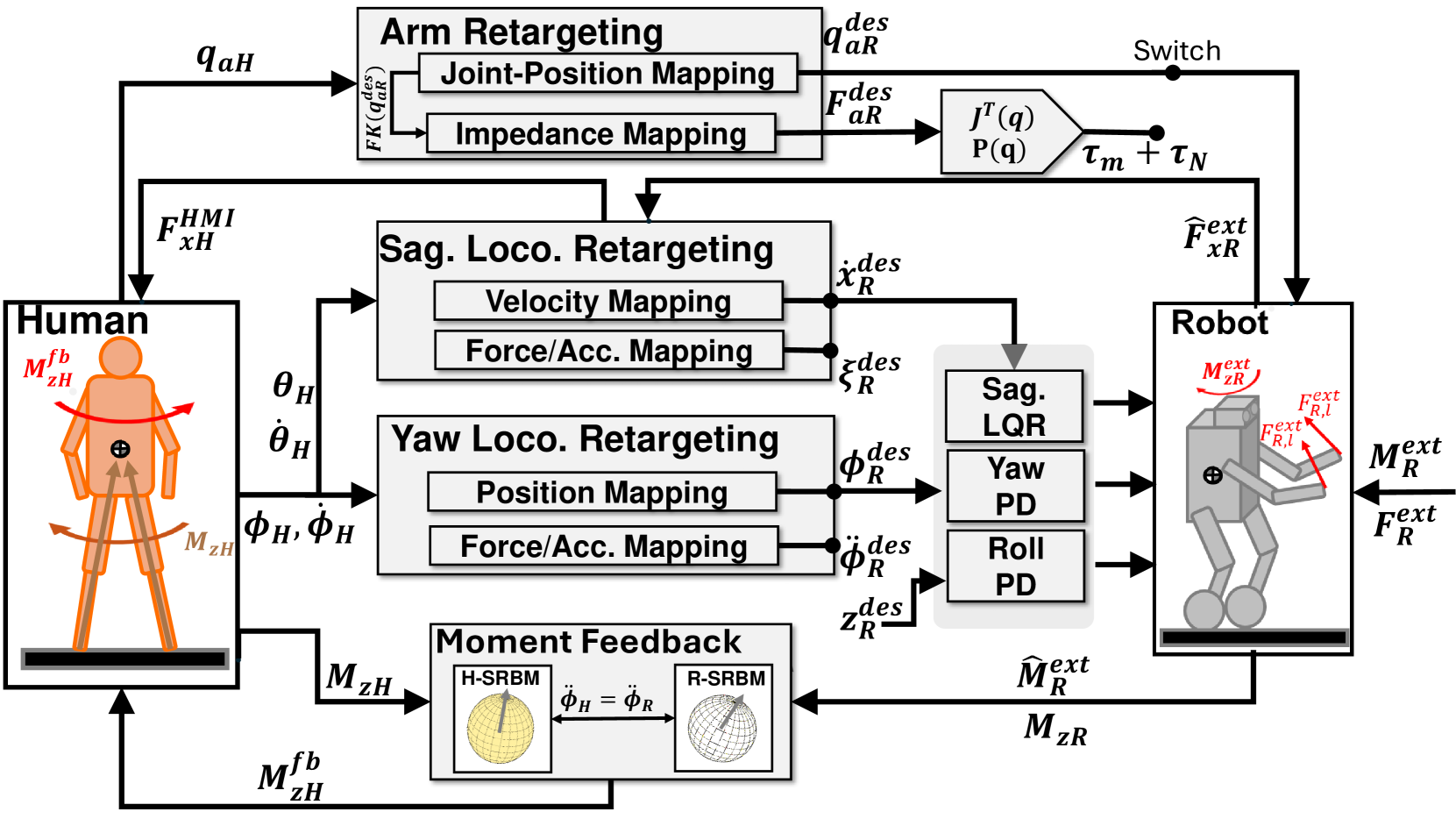
技术框架:该遥操作框架包含以下几个主要模块:1) 人机界面(HMI):用于捕获操作员的运动,并向操作员提供触觉反馈。2) 运动映射模块:将操作员的躯干姿态映射到机器人的位置或加速度控制,将操作员的手臂运动映射到机器人的末端执行器控制(关节位置或阻抗控制)。3) 机器人控制模块:根据运动映射的结果,控制机器人的运动。4) 力/位控制切换模块:根据任务需求,切换末端执行器的控制模式(位置控制或力控制)。
关键创新:该论文的关键创新在于:1) 提出了一种基于躯干姿态的运动映射方法,用于控制机器人的位置或加速度,从而实现全身的协调运动。2) 实现了位置和力控制模式的切换,可以根据任务需求灵活地调整控制策略。3) 通过触觉反馈增强了操作员对机器人与环境交互的感知。
关键设计:论文中,躯干姿态到机器人位置/加速度的映射函数是一个关键设计。具体形式未知,但其目标是保证操作员的直观控制。末端执行器的阻抗控制参数(刚度、阻尼)需要根据具体任务进行调整,以保证机器人的稳定性和操作精度。触觉反馈的设计也需要考虑操作员的感知能力和舒适度,具体实现方式未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够使机器人成功地将重型箱子(5-10.5公斤,高达机器人重量的83%)精确放置到目标位置,并实现人机协作搬运物体。这些实验验证了该方法在动态操作任务中的有效性。虽然论文中没有给出具体的性能数据和对比基线,但实验结果表明该方法具有良好的操作性和稳定性。
🎯 应用场景
该研究成果可应用于制造业、建筑业和医疗保健等领域,使人形机器人能够执行复杂或危险的手动任务,例如重物搬运、精细装配、远程医疗等。通过人机协作,可以提高工作效率和安全性,降低人工成本。未来,该技术有望应用于更广泛的领域,例如灾难救援、太空探索等。
📄 摘要(原文)
Remote-controlled humanoid robots can revolutionize manufacturing, construction, and healthcare industries by performing complex or dangerous manual tasks traditionally done by humans. We refer to these behaviors as Dynamic Loco-Manipulation (DLM). To successfully complete these tasks, humans control the position of their bodies and contact forces at their hands. To enable similar whole-body control in humanoids, we introduce loco-manipulation retargeting strategies with switched position and force control modes in a bilateral teleoperation framework. Our proposed locomotion mappings use the pitch and yaw of the operator's torso to control robot position or acceleration. The manipulation retargeting maps the operator's arm movements to the robot's arms for joint-position or impedance control of the end-effector. A Human-Machine Interface captures the teleoperator's motion and provides haptic feedback to their torso, enhancing their awareness of the robot's interactions with the environment. In this paper, we demonstrate two forms of DLM. First, we show the robot slotting heavy boxes (5-10.5 kg), weighing up to 83% of the robot's weight, into desired positions. Second, we show human-robot collaboration for carrying an object, where the robot and teleoperator take on leader and follower roles.