Trajectory Optimization under Contact Timing Uncertainties
作者: Haizhou Zhao, Majid Khadiv
分类: cs.RO
发布日期: 2024-07-16 (更新: 2024-10-18)
备注: 2024 IEEE-RAS International Conference on Humanoid Robots (Humanoids)
💡 一句话要点
提出一种考虑接触时序不确定性的轨迹优化方法,用于提升机器人运动控制的鲁棒性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轨迹优化 最优控制 接触动力学 不确定性建模 机器人控制
📋 核心要点
- 机器人运动规划中,精确的接触时序假设不现实,感知和建模误差导致接触时序存在不确定性,这给控制带来了挑战。
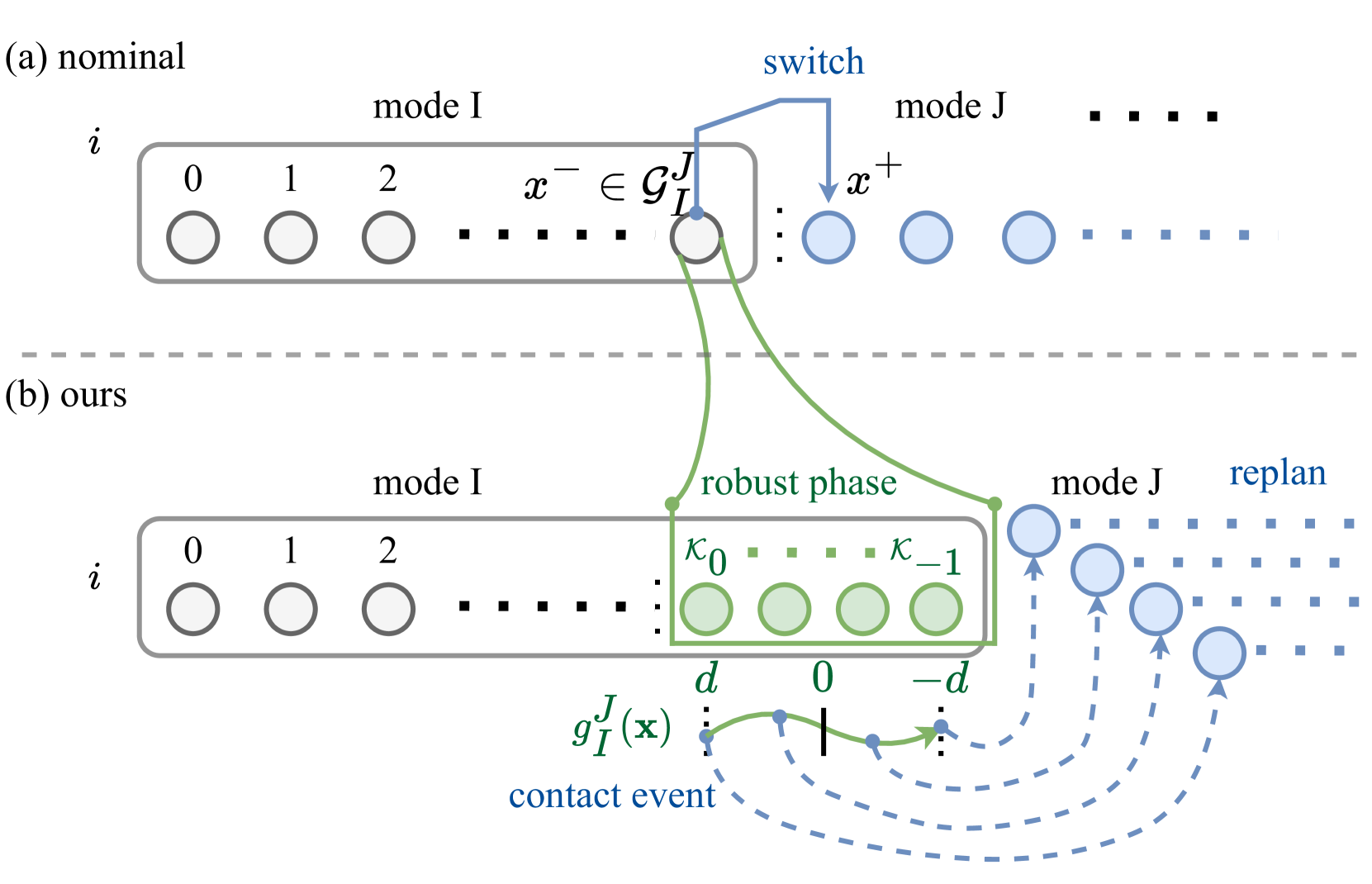
- 该方法将随机优化问题转化为确定性优化,在不确定性集合上优化,保证预接触状态的鲁棒性,避免了复杂的互补约束或组合爆炸。
- 在简化的运动和操作任务中,仿真结果表明,该方法比传统的最优控制方法具有更好的鲁棒性。
📝 摘要(中文)
本文提出了一种新颖的最优控制方法,用于在接触时序不确定性下寻找鲁棒的控制策略。机器人领域中,许多重要问题(如运动和操作)都通过与环境的间歇性接触来实现。由于感知和建模误差,假设与环境建立接触的确切时间是不现实的。处理接触时序的不确定性非常困难,因为它会导致处理不确定的互补系统或在运行时解决组合优化问题。本文的主要创新在于将随机问题转化为确定性优化问题,该优化问题在不确定性集上进行,以确保候选预接触状态满足鲁棒性标准,并优化与接触相关的目标。这样,我们只需要解决一个可管理的标准非线性规划问题,而无需互补约束或组合爆炸。在多个简化的运动和操作任务上的仿真结果表明,与标称最优控制方法相比,我们提出的考虑不确定性的方法具有鲁棒性。
🔬 方法详解
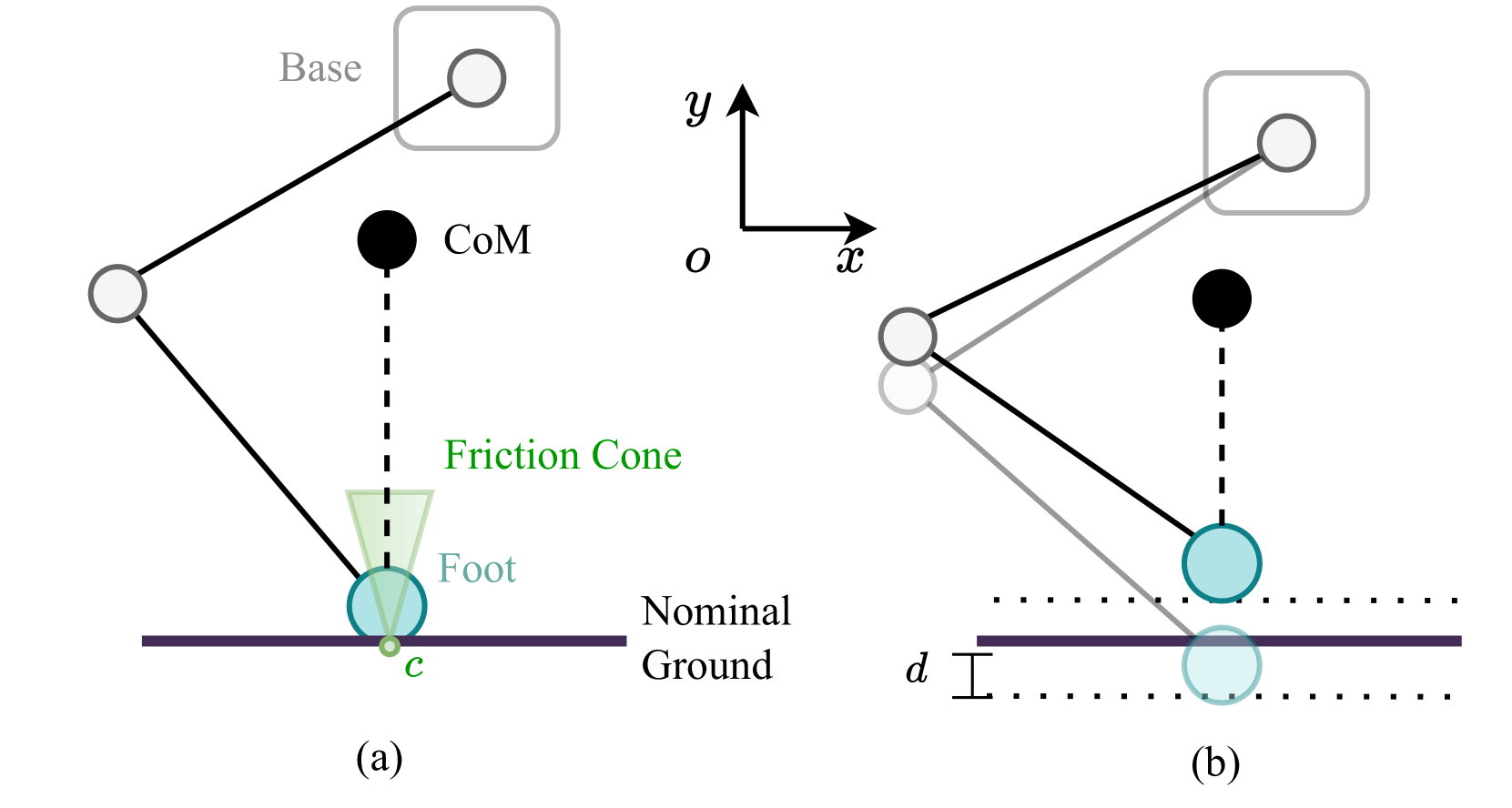
问题定义:机器人运动控制,特别是涉及与环境接触的运动(如行走、操作),对接触时序的精确性非常敏感。然而,由于感知误差、建模误差等因素,实际的接触时序往往存在不确定性。现有的方法要么需要处理不确定的互补系统,要么需要在运行时解决组合优化问题,计算复杂度高,难以保证实时性和鲁棒性。
核心思路:将带有随机性的优化问题,转化为一个确定性的优化问题。核心思想是,在考虑接触时序不确定性的情况下,优化预接触状态,使得即使实际接触时间发生变化,也能保证控制策略的鲁棒性。通过在不确定性集合上进行优化,避免了直接处理随机变量,从而简化了问题。
技术框架:该方法的核心是一个最优控制框架,主要包含以下几个步骤:1. 定义预接触状态和接触相关的目标函数。2. 建立接触时序的不确定性集合,描述接触时间可能的变化范围。3. 将鲁棒性要求转化为对预接触状态的约束,确保在不确定性集合内,控制策略都能满足性能要求。4. 将上述问题转化为一个确定性的非线性规划问题,使用现有的优化算法求解。
关键创新:该方法最关键的创新在于将随机优化问题转化为确定性优化问题。通过在不确定性集合上进行优化,避免了处理复杂的随机变量和互补约束,从而大大降低了计算复杂度。此外,该方法能够显式地考虑接触时序的不确定性,从而提高了控制策略的鲁棒性。
关键设计:该方法需要仔细设计不确定性集合,以准确描述接触时序的不确定性。此外,还需要选择合适的鲁棒性指标,以确保控制策略在不确定性集合内都能满足性能要求。具体实现中,可以使用各种非线性规划求解器来解决最终的优化问题。损失函数的设计需要考虑接触相关的目标,例如最小化接触力、最大化运动速度等。
🖼️ 关键图片

📊 实验亮点
仿真结果表明,与传统的标称最优控制方法相比,该方法在接触时序存在不确定性的情况下,能够显著提高控制策略的鲁棒性。具体而言,在简化的运动和操作任务中,该方法能够保证机器人在接触时间发生变化时,仍然能够稳定地完成任务,而传统的标称最优控制方法则容易失效。具体的性能提升数据未知,需要在论文中进一步查找。
🎯 应用场景
该研究成果可应用于各种需要与环境进行稳定接触的机器人任务中,例如:复杂地形下的机器人行走、精密装配、物体抓取与操作等。通过提高机器人对接触时序不确定性的鲁棒性,可以显著提升机器人在复杂环境中的适应性和可靠性,降低故障率,提高工作效率。未来,该方法有望应用于更广泛的机器人领域,例如自动驾驶、医疗机器人等。
📄 摘要(原文)
Most interesting problems in robotics (e.g., locomotion and manipulation) are realized through intermittent contact with the environment. Due to the perception and modeling errors, assuming an exact time for establishing contact with the environment is unrealistic. On the other hand, handling uncertainties in contact timing is notoriously difficult as it gives rise to either handling uncertain complementarity systems or solving combinatorial optimization problems at run-time. This work presents a novel optimal control formulation to find robust control policies under contact timing uncertainties. Our main novelty lies in casting the stochastic problem to a deterministic optimization over the uncertainty set that ensures robustness criterion satisfaction of candidate pre-contact states and optimizes for contact-relevant objectives. This way, we only need to solve a manageable standard nonlinear programming problem without complementarity constraints or combinatorial explosion. Our simulation results on multiple simplified locomotion and manipulation tasks demonstrate the robustness of our uncertainty-aware formulation compared to the nominal optimal control formulation.