Adaptive Environment-Aware Robotic Arm Reaching Based on a Bio-Inspired Neurodynamical Computational Framework
作者: Dimitrios Chatziparaschis, Shan Zhong, Vasileios Christopoulos, Konstantinos Karydis
分类: cs.RO
发布日期: 2024-07-16
备注: 6 pages, 6 figures, conference
💡 一句话要点
提出基于神经动力学计算框架的自适应环境感知机器人臂抓取方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 神经动力学 动态神经场 随机最优控制 生物启发 自适应控制 目标跟踪
📋 核心要点
- 现有机器人系统在动态环境中进行实时决策和自适应学习方面存在挑战。
- 论文提出基于神经动力学计算框架NeuCF,结合动态神经场和随机最优控制理论,实现动态目标跟踪。
- 实验表明,该系统具有高精度、平滑轨迹和更短路径长度等优点,提升了机器人操作的鲁棒性和动态感知能力。
📝 摘要(中文)
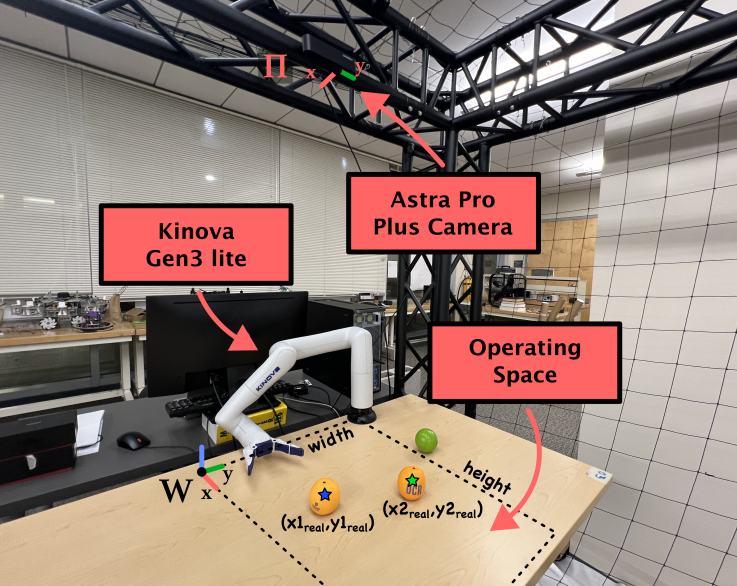
本文提出了一种基于生物启发神经动力学计算框架(NeuCF)的自适应机器人系统,用于动态环境下的目标跟踪。该系统利用六自由度机器人手臂和鸟瞰视觉反馈,实现了对开放区域内动态目标的实时决策。NeuCF是一种基于动态神经场(DNFs)和随机最优控制(SOC)理论的生物启发模型,已训练用于在平面上对视觉信标进行抓取动作。它可以根据环境变化(例如,新目标的出现或现有目标的移除)动态地重新定位目标或生成停止信号。实验结果表明,NeuCF具有较高的末端执行器位置精度,生成平滑的轨迹,并提供比基线三次多项式轨迹生成器更短的路径长度。该系统提供了一种鲁棒且动态感知的机器人操作方法,能够进行实时决策。
🔬 方法详解
问题定义:论文旨在解决动态环境中机器人手臂的实时目标抓取问题。现有方法在处理环境变化,例如目标出现、消失或移动时,往往难以快速适应并做出最优决策,导致抓取精度下降或失败。传统的轨迹生成方法,如三次多项式,缺乏对环境的感知和动态调整能力。
核心思路:论文的核心思路是利用生物启发的神经动力学计算框架(NeuCF),模拟生物神经系统的动态特性,实现对环境变化的快速响应和自适应学习。NeuCF结合了动态神经场(DNFs)和随机最优控制(SOC)理论,能够将视觉信息转化为机器人手臂的运动控制信号,并根据环境变化动态调整轨迹。
技术框架:整体框架包括视觉感知模块、神经动力学计算模块和机器人控制模块。视觉感知模块通过鸟瞰摄像头获取环境信息,识别目标位置。神经动力学计算模块是核心,它接收视觉信息,利用DNFs建立目标位置的动态表征,并使用SOC理论计算最优控制策略。机器人控制模块根据NeuCF的输出,控制六自由度机器人手臂执行抓取动作。当环境发生变化时,NeuCF能够动态调整DNFs和SOC的参数,从而实现对新目标的快速定位和抓取。
关键创新:最重要的技术创新点在于将DNFs和SOC理论结合,构建了一个能够实时处理视觉信息并生成最优控制策略的神经动力学计算框架。与传统的轨迹生成方法相比,NeuCF具有更强的自适应性和鲁棒性,能够更好地应对动态环境中的目标抓取任务。NeuCF能够根据环境变化动态调整内部参数,而无需重新规划整个轨迹。
关键设计:NeuCF的关键设计包括DNFs的参数设置和SOC的优化目标。DNFs的参数决定了神经场的激活模式和稳定性,需要根据具体任务进行调整。SOC的优化目标通常包括最小化抓取时间和能量消耗,同时保证抓取精度。论文中可能涉及到对这些参数的优化方法,例如通过强化学习或进化算法进行训练。
🖼️ 关键图片


📊 实验亮点
实验结果表明,基于NeuCF的机器人系统在动态目标抓取任务中表现出色。与基线三次多项式轨迹生成器相比,NeuCF能够生成更短的路径长度,提高了抓取效率。同时,NeuCF具有较高的末端执行器位置精度,保证了抓取的准确性。具体性能数据(例如,路径长度缩短百分比、位置精度误差等)需要在论文中查找。
🎯 应用场景
该研究成果可应用于自动化生产线、物流仓储、医疗机器人等领域。在自动化生产线上,机器人可以利用该技术快速识别和抓取不同位置和姿态的零件。在物流仓储中,机器人可以根据订单需求,动态调整抓取策略,提高分拣效率。在医疗领域,该技术可用于辅助医生进行手术操作,提高手术精度和安全性。未来,该技术有望进一步发展,实现更复杂环境下的机器人自主操作。
📄 摘要(原文)
Bio-inspired robotic systems are capable of adaptive learning, scalable control, and efficient information processing. Enabling real-time decision-making for such systems is critical to respond to dynamic changes in the environment. We focus on dynamic target tracking in open areas using a robotic six-degree-of-freedom manipulator with a bird-eye view camera for visual feedback, and by deploying the Neurodynamical Computational Framework (NeuCF). NeuCF is a recently developed bio-inspired model for target tracking based on Dynamic Neural Fields (DNFs) and Stochastic Optimal Control (SOC) theory. It has been trained for reaching actions on a planar surface toward localized visual beacons, and it can re-target or generate stop signals on the fly based on changes in the environment (e.g., a new target has emerged, or an existing one has been removed). We evaluated our system over various target-reaching scenarios. In all experiments, NeuCF had high end-effector positional accuracy, generated smooth trajectories, and provided reduced path lengths compared with a baseline cubic polynomial trajectory generator. In all, the developed system offers a robust and dynamic-aware robotic manipulation approach that affords real-time decision-making.