Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning
作者: Ian D. Miller, Fernando Cladera, Trey Smith, Camillo Jose Taylor, Vijay Kumar
分类: cs.RO
发布日期: 2024-07-13
备注: Video: https://www.youtube.com/watch?v=ieNYH40buBo
期刊: IEEE Transactions on Field Robotics (2024)
💡 一句话要点
提出基于语义全景在线地图与规划的SPOMP空地协同框架
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 空地协同 多机器人系统 语义地图 在线地图构建 任务规划
📋 核心要点
- 多机器人协同需要超越几何信息的地图,以支持复杂任务的规划与执行,尤其是在空地协同场景下。
- 论文提出SPOMP框架,利用语义地图实现空地机器人在GPS拒止环境下的协同定位、任务规划与执行。
- 通过大规模现场实验和模拟验证,证明了该框架在真实通信、导航和感知约束下的大规模协同能力。
📝 摘要(中文)
本文提出了一种用于多机器人自主的框架,特别关注在室外2.5D环境中运行的空中和地面机器人。我们认为,为了实现日益复杂的自主性,尤其是在机器人之间,地图必须超越纯粹的几何或视觉信息编码。我们展示了语义地图如何能够实现复杂协同任务的规范、规划和执行,包括在GPS受限环境中的定位。本研究的一个显著特点是,我们非常强调现场实验和测试,并通过这样做证明了这些想法可以在现实世界中大规模地工作。我们还进行了广泛的模拟实验,以验证我们在更大规模上的想法。我们相信这些实验和实验结果构成了朝着推进大规模、协作多机器人系统在实际通信、导航和感知约束下运行的最新技术水平迈出的重要一步。
🔬 方法详解
问题定义:现有方法在多机器人协同中,地图通常只包含几何或视觉信息,难以支持复杂任务的规划和执行,尤其是在GPS拒止等复杂环境下。空地协同任务需要更高级的语义理解和推理能力,现有方法难以满足。
核心思路:论文的核心思路是利用语义地图作为空地机器人协同的桥梁,通过语义信息实现任务的规范、规划和执行。语义地图能够提供环境的高层抽象,使得机器人能够理解环境中的物体、区域及其关系,从而进行更智能的决策。
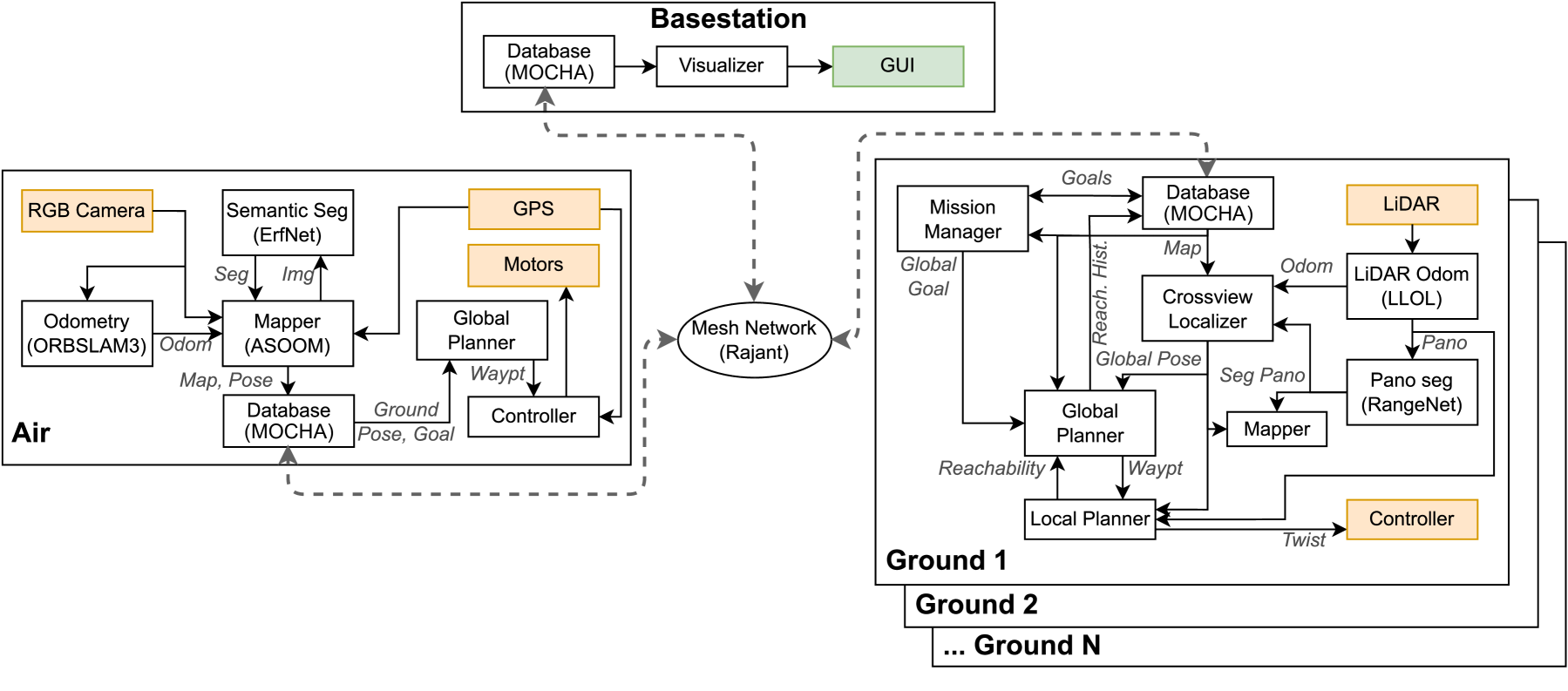
技术框架:SPOMP框架包含以下主要模块:1) 语义全景在线地图构建:利用空中和地面机器人采集的数据,构建包含语义信息的全景地图。2) 任务规范:用户或系统根据语义地图定义任务目标和约束。3) 任务规划:基于语义地图和任务规范,生成空地机器人的协同行动计划。4) 任务执行:空地机器人按照规划的行动计划执行任务,并实时更新语义地图。
关键创新:该论文的关键创新在于将语义地图应用于空地协同任务,并提出了一个完整的SPOMP框架来实现这一目标。与现有方法相比,该方法能够更好地支持复杂任务的规划和执行,尤其是在GPS拒止等复杂环境下。此外,该论文强调了现场实验和测试,证明了该方法在真实环境中的可行性和有效性。
关键设计:论文中关于语义地图的构建、任务规划算法以及空地协同策略的具体技术细节未知,摘要中没有详细描述。但是,可以推测语义地图的构建可能涉及到图像分割、目标检测等计算机视觉技术,任务规划算法可能涉及到搜索算法、优化算法等,空地协同策略可能涉及到通信协议、任务分配等。
🖼️ 关键图片


📊 实验亮点
论文强调了大规模现场实验和模拟验证,证明了SPOMP框架在真实通信、导航和感知约束下的可行性和有效性。虽然摘要中没有给出具体的性能数据,但强调了实验结果构成了朝着推进大规模、协作多机器人系统技术水平迈出的重要一步。具体的性能提升幅度未知。
🎯 应用场景
该研究成果可应用于灾害救援、环境监测、农业巡检、物流配送等领域。通过空地机器人协同,可以实现更高效、更安全的任务执行,尤其是在复杂、危险的环境中。未来,该技术有望进一步发展,实现更高级别的自主化和智能化,为人类提供更便捷、更智能的服务。
📄 摘要(原文)
Mapping and navigation have gone hand-in-hand since long before robots existed. Maps are a key form of communication, allowing someone who has never been somewhere to nonetheless navigate that area successfully. In the context of multi-robot systems, the maps and information that flow between robots are necessary for effective collaboration, whether those robots are operating concurrently, sequentially, or completely asynchronously. In this paper, we argue that maps must go beyond encoding purely geometric or visual information to enable increasingly complex autonomy, particularly between robots. We propose a framework for multi-robot autonomy, focusing in particular on air and ground robots operating in outdoor 2.5D environments. We show that semantic maps can enable the specification, planning, and execution of complex collaborative missions, including localization in GPS-denied settings. A distinguishing characteristic of this work is that we strongly emphasize field experiments and testing, and by doing so demonstrate that these ideas can work at scale in the real world. We also perform extensive simulation experiments to validate our ideas at even larger scales. We believe these experiments and the experimental results constitute a significant step forward toward advancing the state-of-the-art of large-scale, collaborative multi-robot systems operating with real communication, navigation, and perception constraints.