Sensorimotor Attention and Language-based Regressions in Shared Latent Variables for Integrating Robot Motion Learning and LLM
作者: Kanata Suzuki, Tetsuya Ogata
分类: cs.RO
发布日期: 2024-07-12
备注: 7 pages, 8 figures, accepted at IROS 2024
💡 一句话要点
提出基于共享隐变量的机器人运动学习与LLM集成方法,解决运动生成中的端到端反馈问题。
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人运动学习 大型语言模型 共享隐变量 端到端反馈 感觉运动注意 语言指令泛化 机器人控制
📋 核心要点
- 现有方法在结合LLM和机器人运动生成时,缺乏端到端的反馈机制,难以适应真实环境。
- 该方法利用共享隐变量连接机器人运动学习模型和LLM,通过预测误差更新共享参数。
- 实验表明,该方法在位置泛化和语言指令泛化方面表现出良好的性能。
📝 摘要(中文)
近年来,将大型语言模型(LLM)与机器人技术相结合的研究非常活跃;然而,大多数研究没有考虑到机器人运动生成阶段的端到端反馈。深度神经网络的预测必然包含误差,因此需要更新训练好的模型以适应真实环境,从而自适应地生成机器人运动。本研究提出了一种集成方法,该方法使用共享隐变量连接机器人运动学习模型和LLM。在生成机器人运动时,该方法基于来自感觉运动注意点和给予机器人的任务语言指令的预测误差来更新共享参数。这使得模型能够有效地搜索适合机器人任务的潜在参数。通过在多个机器人任务上的模拟器实验,我们从位置泛化和语言指令泛化能力两个方面证明了我们提出的方法的有效性。
🔬 方法详解
问题定义:现有方法在机器人运动生成中结合LLM时,通常忽略了端到端的反馈。这意味着模型在生成运动后,无法根据实际环境中的误差进行调整,导致泛化能力不足。特别是,深度神经网络的预测不可避免地存在误差,如何有效地利用这些误差来更新模型,使其适应真实环境,是一个关键问题。
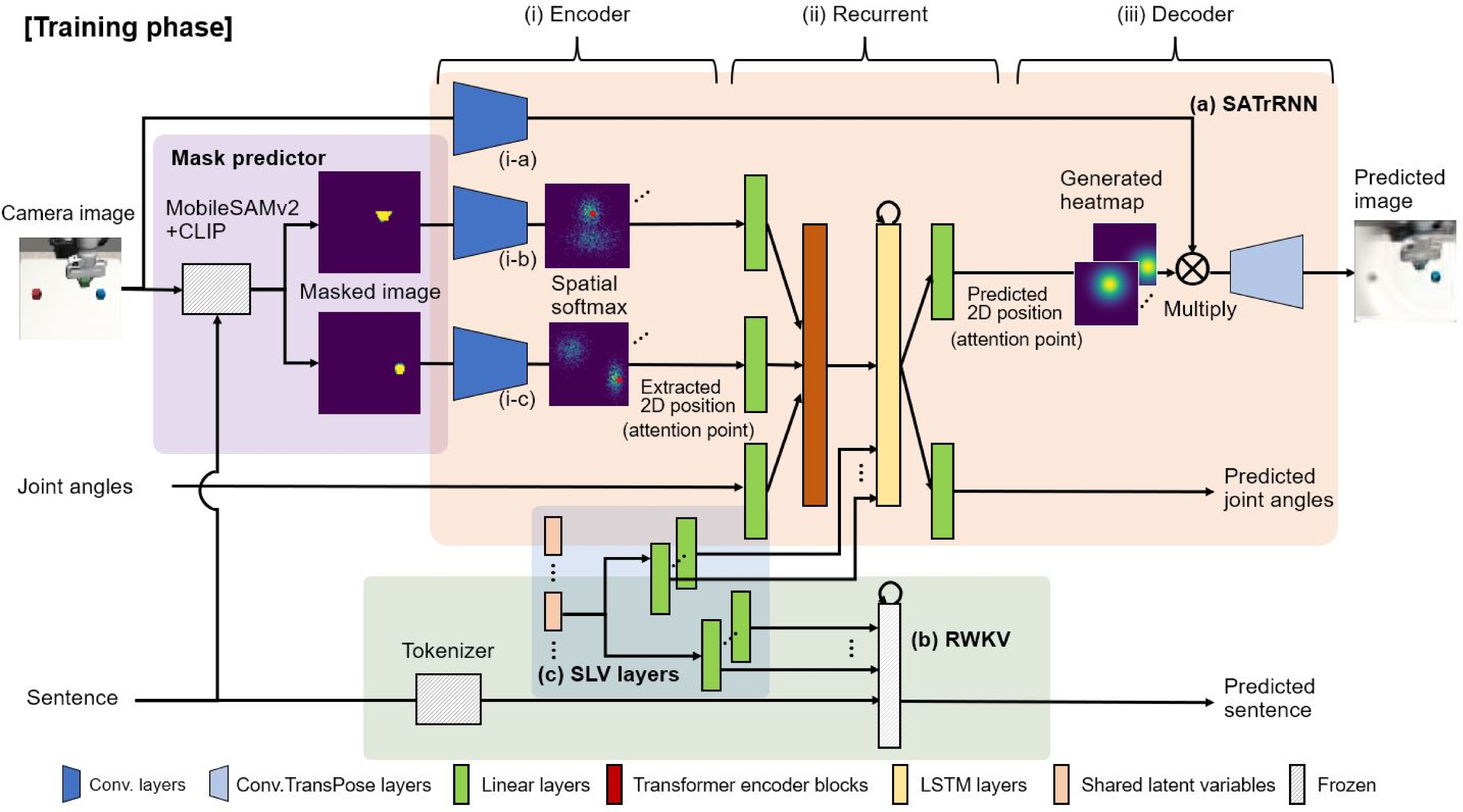
核心思路:该论文的核心思路是利用共享隐变量空间,将机器人运动学习模型和LLM连接起来。通过这种方式,来自感觉运动注意点(sensorimotor attention points)和任务语言指令的预测误差可以共同作用于共享隐变量,从而更新模型参数。这种方法允许模型在隐变量空间中搜索更适合当前任务的参数,实现自适应的运动生成。
技术框架:整体框架包含两个主要部分:机器人运动学习模型和LLM。这两个模型通过共享的隐变量空间连接。当给定任务语言指令时,LLM生成一个隐变量表示,该表示被传递给机器人运动学习模型。机器人运动学习模型根据该隐变量生成机器人运动。同时,模型会监测感觉运动注意点的预测误差和语言指令的预测误差。这些误差被用于更新共享隐变量空间中的参数,从而实现端到端的反馈。
关键创新:该方法最重要的创新点在于利用共享隐变量空间实现了机器人运动学习模型和LLM的有效集成,并利用感觉运动注意点和语言指令的预测误差进行模型更新。这种方法能够有效地利用来自不同模态的信息,提高模型的泛化能力和适应性。与现有方法相比,该方法能够更好地处理真实环境中的不确定性和误差。
关键设计:具体的网络结构和损失函数细节未知,但可以推测,共享隐变量空间可能采用某种形式的自编码器结构,用于学习机器人运动和语言指令的共同表示。损失函数可能包含两部分:一部分是机器人运动的重构误差,另一部分是语言指令的预测误差。此外,感觉运动注意点的选择和误差计算方式也是关键的设计细节,但论文摘要中没有详细说明。
🖼️ 关键图片


📊 实验亮点
该研究通过模拟器实验验证了所提出方法的有效性。实验结果表明,该方法在位置泛化和语言指令泛化方面都取得了显著的性能提升。具体的性能数据和对比基线在摘要中未给出,但强调了该方法能够有效地搜索适合机器人任务的潜在参数,从而提高模型的适应性。
🎯 应用场景
该研究成果可应用于各种需要机器人与人类进行自然语言交互的场景,例如智能家居、辅助机器人、工业自动化等。通过结合LLM的强大语言理解能力和机器人运动学习的灵活性,可以实现更加智能、高效和安全的机器人系统。未来的研究可以进一步探索如何利用该方法处理更复杂的任务和环境。
📄 摘要(原文)
In recent years, studies have been actively conducted on combining large language models (LLM) and robotics; however, most have not considered end-to-end feedback in the robot-motion generation phase. The prediction of deep neural networks must contain errors, it is required to update the trained model to correspond to the real environment to generate robot motion adaptively. This study proposes an integration method that connects the robot-motion learning model and LLM using shared latent variables. When generating robot motion, the proposed method updates shared parameters based on prediction errors from both sensorimotor attention points and task language instructions given to the robot. This allows the model to search for latent parameters appropriate for the robot task efficiently. Through simulator experiments on multiple robot tasks, we demonstrated the effectiveness of our proposed method from two perspectives: position generalization and language instruction generalization abilities.