Hardware Neural Control of CartPole and F1TENTH Race Car
作者: Marcin Paluch, Florian Bolli, Xiang Deng, Antonio Rios Navarro, Chang Gao, Tobi Delbruck
分类: cs.RO, cs.LG, eess.SY
发布日期: 2024-07-11
💡 一句话要点
提出基于FPGA硬件神经网络控制,提升CartPole和F1TENTH赛车控制性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: FPGA 神经网络控制 非线性模型预测控制 倒立摆 F1TENTH赛车 硬件加速 嵌入式系统
📋 核心要点
- 非线性模型预测控制(NMPC)计算量大,难以满足实时性要求,限制了其在快速控制场景的应用。
- 利用FPGA实现神经网络控制器(NC),通过模仿NMPC,实现低延迟、高频率的控制,提升控制性能。
- 实验表明,FPGA NC在倒立摆和F1TENTH赛车上均优于NMPC,实现了kHz级别的控制频率。
📝 摘要(中文)
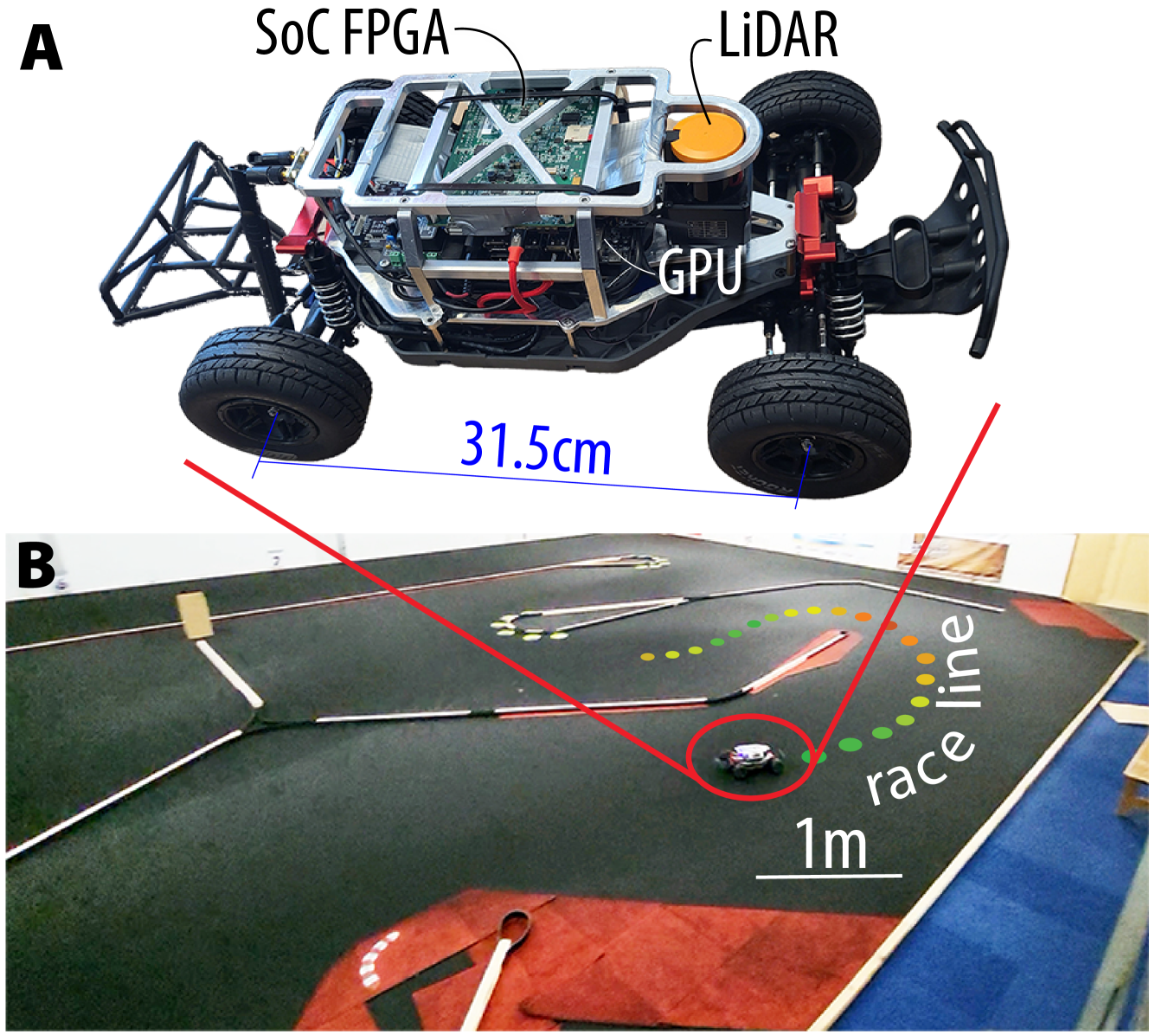
非线性模型预测控制(NMPC)已被证明是一种有效的控制方法,但计算成本很高。本文展示了使用硬件FPGA神经网络控制器,通过监督学习模仿NMPC。我们将这些在廉价嵌入式FPGA硬件上实现的神经控制器(NC)用于物理倒立摆和F1TENTH赛车的高频控制。结果表明,NC在仿真中与NMPC的控制性能相匹配,并且在现实中优于NMPC,这归功于快速的FPGA NC推理所带来的更快控制速率。我们展示了物理倒立摆的kHz控制速率,以及在F1TENTH赛车上将控制卸载到FPGA硬件。本文的代码和硬件实现可在https://github.com/SensorsINI/Neural-Control-Tools上找到。
🔬 方法详解
问题定义:论文旨在解决非线性模型预测控制(NMPC)计算量大,难以应用于需要高频控制的实际系统的问题。NMPC虽然控制效果好,但其复杂的优化过程导致计算延迟较高,限制了其在实时性要求高的场景中的应用,例如快速运动的机器人或车辆控制。
核心思路:论文的核心思路是利用神经网络学习NMPC的控制策略,然后将训练好的神经网络部署到FPGA上。由于神经网络的推理速度远快于NMPC的优化计算,因此可以实现更高的控制频率。通过模仿学习,神经网络可以学习到NMPC的控制行为,从而在保证控制性能的同时,显著降低计算延迟。
技术框架:整体框架包括以下几个主要步骤:1) 使用NMPC生成训练数据;2) 训练神经网络,使其模仿NMPC的控制策略;3) 将训练好的神经网络部署到FPGA上;4) 在实际系统(倒立摆和F1TENTH赛车)上进行测试。FPGA负责接收传感器数据,运行神经网络进行推理,并输出控制指令。
关键创新:最重要的技术创新点在于将神经网络控制器部署到FPGA上,从而实现了高频率、低延迟的控制。与传统的基于CPU或GPU的控制方法相比,FPGA具有更高的并行性和更低的功耗,更适合于嵌入式应用。此外,通过模仿学习,神经网络可以学习到复杂的NMPC控制策略,而无需手动设计控制器。
关键设计:论文中神经网络的具体结构未知,但强调了针对FPGA的优化。损失函数采用监督学习常用的均方误差损失,目标是最小化神经网络输出的控制指令与NMPC输出的控制指令之间的差异。控制频率是关键参数,实验中倒立摆实现了kHz级别的控制频率,F1TENTH赛车也实现了较高的控制频率。
🖼️ 关键图片


📊 实验亮点
实验结果表明,基于FPGA的神经网络控制器在倒立摆和F1TENTH赛车上均取得了良好的控制效果。在倒立摆实验中,实现了kHz级别的控制频率,显著优于传统的基于CPU的控制方法。在F1TENTH赛车实验中,FPGA NC在实际赛道上超过了NMPC的性能,证明了其在复杂环境下的鲁棒性和实时性。
🎯 应用场景
该研究成果可广泛应用于需要高频控制的机器人和自动化系统中,例如高速运动的机器人、无人机、自动驾驶车辆等。通过将复杂的控制算法部署到FPGA上,可以实现更快的响应速度和更高的控制精度,从而提高系统的整体性能和安全性。此外,该方法还可以应用于其他需要实时控制的领域,例如工业自动化、航空航天等。
📄 摘要(原文)
Nonlinear model predictive control (NMPC) has proven to be an effective control method, but it is expensive to compute. This work demonstrates the use of hardware FPGA neural network controllers trained to imitate NMPC with supervised learning. We use these Neural Controllers (NCs) implemented on inexpensive embedded FPGA hardware for high frequency control on physical cartpole and F1TENTH race car. Our results show that the NCs match the control performance of the NMPCs in simulation and outperform it in reality, due to the faster control rate that is afforded by the quick FPGA NC inference. We demonstrate kHz control rates for a physical cartpole and offloading control to the FPGA hardware on the F1TENTH car. Code and hardware implementation for this paper are available at https:// github.com/SensorsINI/Neural-Control-Tools.