Model Predictive Control For Mobile Manipulators Based On Neural Dynamics(Extended version)
作者: Tao Su, Shiqi Zheng
分类: cs.RO, eess.SY
发布日期: 2024-07-11
备注: This article consists of 13 pages, including the text and the proof process
💡 一句话要点
提出基于神经动力学的移动机械臂模型预测控制方案,实现高精度轨迹跟踪
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 移动机械臂 模型预测控制 神经动力学 轨迹跟踪 有限时间控制
📋 核心要点
- 移动机械臂轨迹跟踪面临精度和同步控制挑战,现有方法难以兼顾多目标优化。
- 论文提出POMPTC方案,同步优化跟踪误差、关节速度和加速度,实现位置和姿态的精确控制。
- 通过FTCND模型求解POMPTC,并结合NFTSM控制,实验验证了其鲁棒性、快速收敛和高精度。
📝 摘要(中文)
本文研究了移动机械臂(MMs)的轨迹跟踪问题。首先,为移动机械臂构建了一种位置和姿态模型预测跟踪控制(POMPTC)方案。所提出的POMPTC方案可以同时最小化跟踪误差、关节速度和关节加速度,并能实现末端执行器位置和姿态的同步控制。其次,构建了一个有限时间收敛神经动力学(FTCND)模型,以找到POMPTC方案的最优解。然后,基于所提出的POMPTC方案,提出了一种非奇异快速终端滑模(NFTSM)控制方法,该方法考虑了基座运动对机械臂在动力学层面造成的扰动,能够实现有限时间的跟踪性能并提高抗扰动能力。最后,仿真和实验表明,所提出的控制方法具有鲁棒性强、收敛速度快、控制精度高等优点。
🔬 方法详解
问题定义:移动机械臂的轨迹跟踪问题,尤其是在同时考虑位置和姿态的同步控制时,面临着精度和效率的挑战。现有的控制方法可能难以同时最小化跟踪误差、关节速度和加速度,并且对基座运动引起的扰动不够鲁棒。
核心思路:论文的核心思路是结合模型预测控制(MPC)的优化能力和神经动力学(Neural Dynamics)的快速求解能力,设计一种能够同时优化多个目标的控制方案。通过引入有限时间收敛的神经动力学模型,可以快速找到MPC问题的最优解,从而实现移动机械臂的高精度轨迹跟踪。此外,还考虑了基座运动对机械臂的扰动,并采用非奇异快速终端滑模控制来提高系统的鲁棒性。
技术框架:整体框架包括以下几个主要模块:1) 位置和姿态模型预测跟踪控制(POMPTC)方案设计,用于定义优化目标和约束;2) 有限时间收敛神经动力学(FTCND)模型构建,用于求解POMPTC方案的最优控制量;3) 非奇异快速终端滑模(NFTSM)控制方法设计,用于补偿基座运动引起的扰动。整个流程是首先通过POMPTC建立优化问题,然后利用FTCND快速求解,最后通过NFTSM提高鲁棒性。
关键创新:论文的关键创新在于将模型预测控制与神经动力学相结合,提出了一种新的移动机械臂轨迹跟踪控制方案。传统的MPC方法通常需要大量的计算资源来求解优化问题,而FTCND模型可以提供一种更快速的求解方法。此外,NFTSM控制的引入提高了系统对外部扰动的鲁棒性,使得控制系统能够在更复杂的环境中稳定运行。
关键设计:POMPTC方案中,需要合理选择跟踪误差、关节速度和关节加速度的权重系数,以平衡各个优化目标。FTCND模型的设计需要保证其有限时间收敛性,并能够准确地逼近最优解。NFTSM控制器的设计需要仔细选择滑模面和控制增益,以保证系统的稳定性和快速收敛性。具体的参数设置需要根据具体的移动机械臂系统和任务进行调整。
🖼️ 关键图片


📊 实验亮点
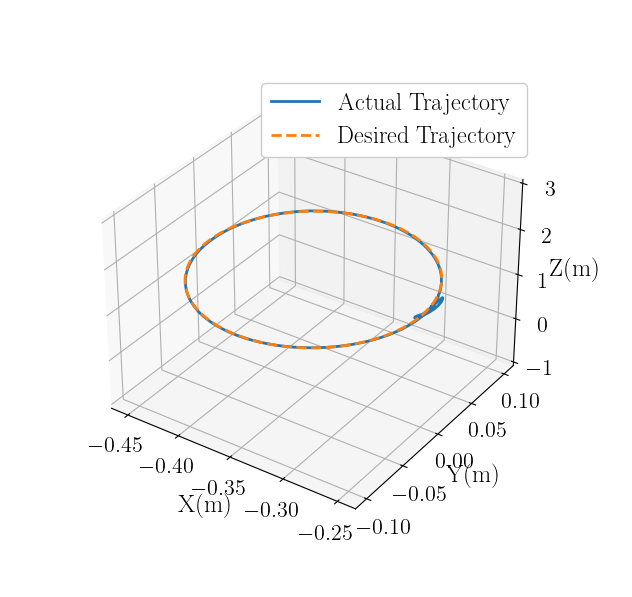
论文通过仿真和实验验证了所提出控制方法的有效性。实验结果表明,该方法具有较强的鲁棒性、较快的收敛速度和较高的控制精度。具体的性能数据(例如跟踪误差、收敛时间等)在论文中进行了详细的展示和分析,并与现有的控制方法进行了对比,证明了该方法的优越性。
🎯 应用场景
该研究成果可应用于各种需要高精度轨迹跟踪的移动机械臂应用场景,例如:自动化装配、精密喷涂、移动检测、医疗机器人等。通过提高移动机械臂的控制精度和鲁棒性,可以提升生产效率和产品质量,降低人工成本,并拓展移动机械臂的应用范围。
📄 摘要(原文)
This article focuses on the trajectory tracking problem of mobile manipulators (MMs). Firstly, we construct a position and orientation model predictive tracking control (POMPTC) scheme for mobile manipulators. The proposed POMPTC scheme can simultaneously minimize the tracking error, joint velocity, and joint acceleration. Moreover, it can achieve synchronous control for the position and orientation of the end-effector. Secondly, a finite-time convergent neural dynamics (FTCND) model is constructed to find the optimal solution of the POMPTC scheme. Then, based on the proposed POMPTC scheme, a non-singular fast terminal sliding model (NFTSM) control method is presented, which considers the disturbances caused by the base motion on the manipulator at the dynamic level. It can achieve finite-time tracking performance and improve the anti-disturbances ability. Finally, simulation and experiments show that the proposed control method has the advantages of strong robustness, fast convergence, and high control accuracy.