Estimation and Control of Motor Core Temperature with Online Learning of Thermal Model Parameters: Application to Musculoskeletal Humanoids
作者: Kento Kawaharazuka, Naoki Hiraoka, Kei Tsuzuki, Moritaka Onitsuka, Yuki Asano, Kei Okada, Koji Kawasaki, Masayuki Inaba
分类: cs.RO
发布日期: 2024-07-10
备注: Accepted at IEEE Robotics and Automation Letters
💡 一句话要点
提出一种基于在线学习热模型参数的电机温度估计与控制方法,应用于肌肉骨骼人形机器人。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 电机温度估计 在线学习 热模型参数 肌肉骨骼人形机器人 温度管理 异常检测 机器人控制
📋 核心要点
- 现有方法在电机温度估计方面存在不足,难以准确预测电机核心温度,影响机器人运动性能。
- 提出在线学习电机热模型参数的方法,实时更新模型,提高电机核心温度估计的准确性。
- 将该方法应用于肌肉骨骼人形机器人,验证了其在持续运动中的有效性,提升了机器人运动的可靠性。
📝 摘要(中文)
本研究针对机器人持续运动中电机温度估计和管理的重要性,提出了一种电机热模型参数的在线学习方法,以实现电机核心温度的精确估计。此外,还提出了一种利用更新后的模型和电机异常检测方法进行电机核心温度管理的方法。最后,将该方法应用于肌肉骨骼人形机器人的肌肉,验证了其持续运动能力。
🔬 方法详解
问题定义:论文旨在解决机器人电机核心温度难以精确估计的问题。现有方法通常依赖于预先标定的热模型,但这些模型难以适应电机运行状态的变化,导致温度估计不准确,影响机器人的持续运动能力。电机温度过高可能导致性能下降甚至损坏,因此精确的温度估计和管理至关重要。
核心思路:论文的核心思路是通过在线学习的方式,实时更新电机热模型的参数,使其能够更好地适应电机的实际运行状态。通过不断地学习和调整模型参数,可以提高电机核心温度估计的准确性,从而实现更有效的温度管理和控制。
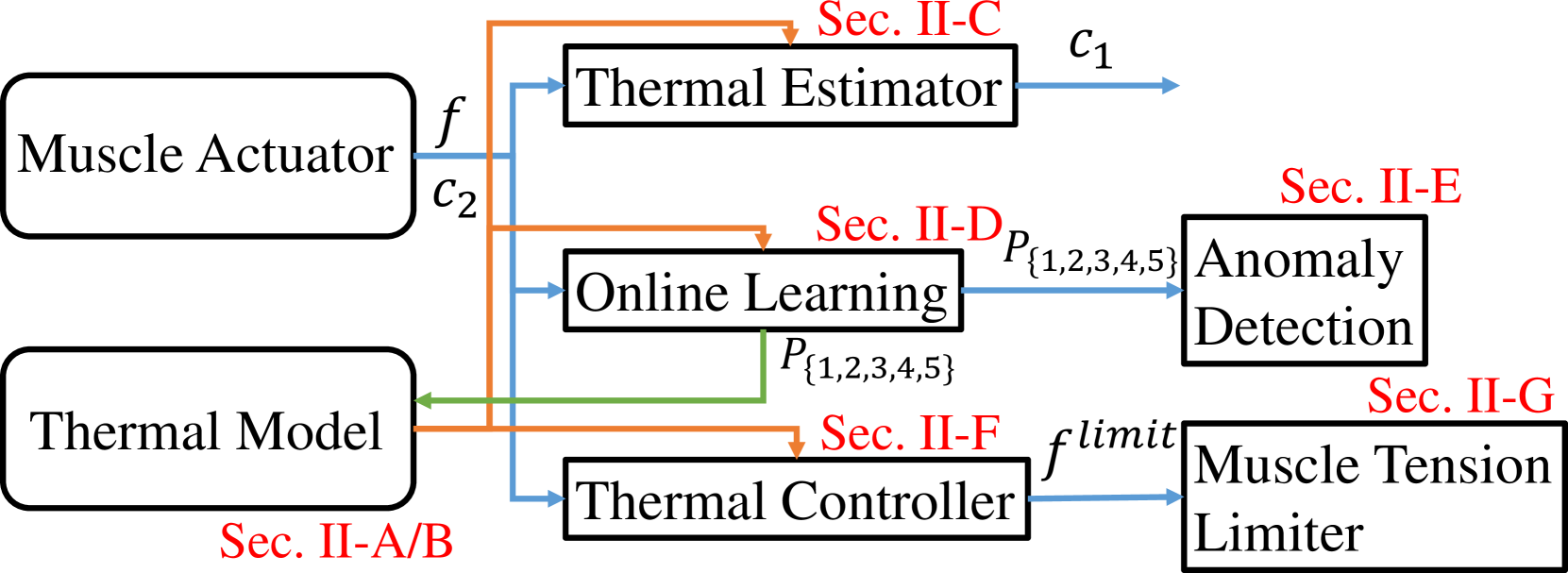
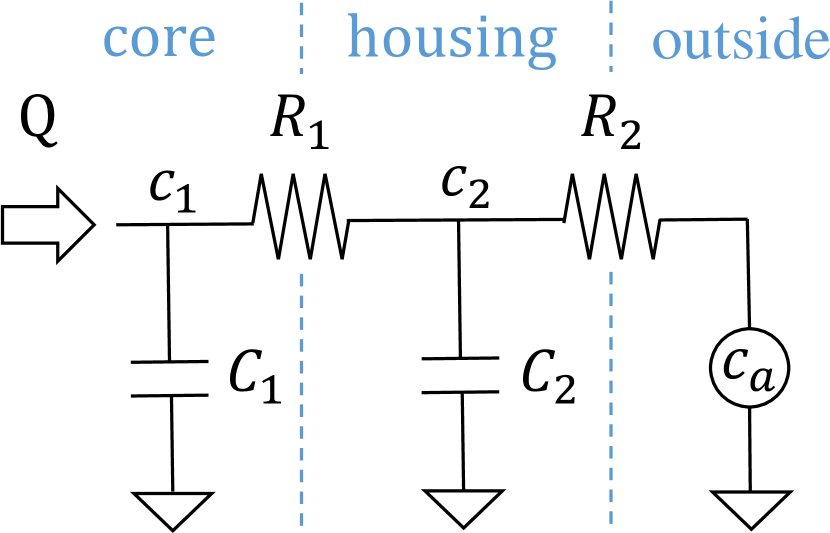
技术框架:该方法主要包含以下几个模块:1) 电机热模型构建:建立描述电机温度变化的数学模型,包括热阻、热容等参数。2) 在线学习算法:利用电机运行数据(如电流、电压、转速等),采用在线学习算法(具体算法未知)实时更新热模型参数。3) 温度估计:利用更新后的热模型,估计电机核心温度。4) 温度管理与控制:基于估计的温度,采用控制策略(具体策略未知)调节电机运行状态,防止温度过高。5) 异常检测:监测电机运行状态,检测潜在的异常情况,及时采取措施。
关键创新:该方法最重要的创新点在于采用在线学习的方式,实时更新电机热模型参数。与传统的离线标定方法相比,该方法能够更好地适应电机运行状态的变化,提高温度估计的准确性和鲁棒性。此外,结合异常检测方法,可以进一步提高系统的可靠性。
关键设计:论文中关于在线学习算法、控制策略和异常检测方法的具体设计细节未知。热模型的具体形式(如集总参数模型)也未知。这些技术细节对于方法的实际效果至关重要,需要在论文正文中进一步阐述。
🖼️ 关键图片
📊 实验亮点
论文验证了所提出的方法在肌肉骨骼人形机器人上的有效性,证明了其能够实现机器人的持续运动。具体的性能数据(如温度估计精度、运动持续时间等)以及与基线方法的对比结果未知,需要在论文正文中进一步阐述。
🎯 应用场景
该研究成果可广泛应用于各种机器人领域,特别是对运动性能和可靠性要求较高的机器人,如人形机器人、外骨骼机器人、工业机器人等。精确的电机温度估计和管理可以提高机器人的运动精度、延长电机寿命、降低维护成本,并为机器人实现更复杂、更持久的任务提供保障。
📄 摘要(原文)
The estimation and management of motor temperature are important for the continuous movements of robots. In this study, we propose an online learning method of thermal model parameters of motors for an accurate estimation of motor core temperature. Also, we propose a management method of motor core temperature using the updated model and anomaly detection method of motors. Finally, we apply this method to the muscles of the musculoskeletal humanoid and verify the ability of continuous movements.