How Much Progress Did I Make? An Unexplored Human Feedback Signal for Teaching Robots
作者: Hang Yu, Qidi Fang, Shijie Fang, Reuben M. Aronson, Elaine Schaertl Short
分类: cs.RO, cs.AI, cs.LG
发布日期: 2024-07-08 (更新: 2025-12-29)
备注: 8 pages. RO-MAN 2024
🔗 代码/项目: GITHUB
💡 一句话要点
提出进度信号以提升机器人教学效果
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人教学 人机交互 反馈信号 学习效率 非专家演示
📋 核心要点
- 现有的机器人教学方法往往缺乏有效的反馈信号,导致学习效率低下。
- 本研究提出了一种新的教学信号——进度,旨在通过表示任务完成百分比来改善机器人学习体验。
- 实验结果表明,进度信号能够有效指示任务成功与否,并且在参与者之间表现出一致性,且不增加额外负担。
📝 摘要(中文)
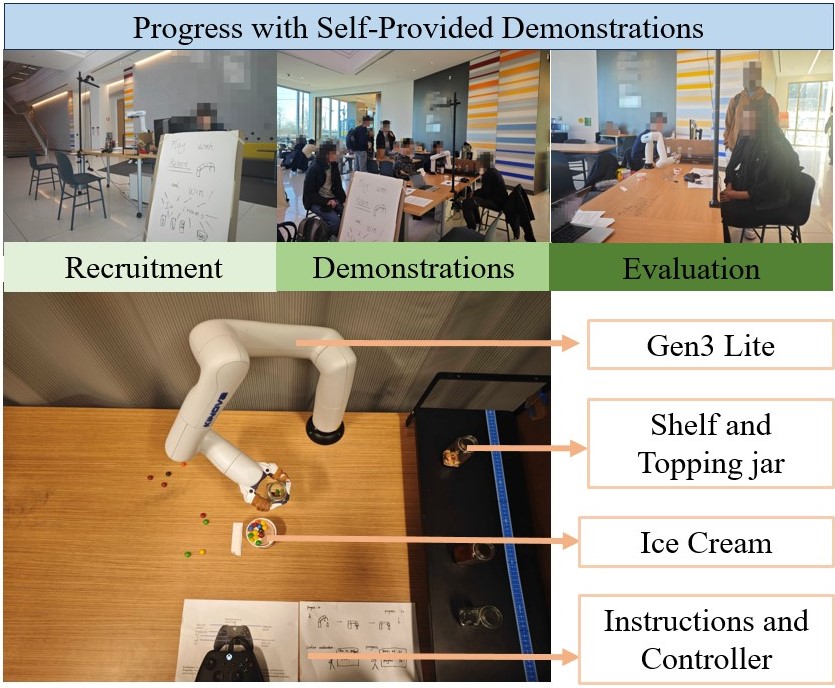
增强人类教学的表达能力对于改善机器人从人类学习的效果及人类与机器人之间的教学体验至关重要。本研究对一种鲜有使用的教学信号——进度进行了特征化和测试,旨在表示任务的完成百分比。通过对76名众包参与者的两项在线研究和对40名非专家参与者的公共空间研究,我们验证了进度信号的有效性。研究发现,进度信号能够指示任务是否成功执行,反映任务完成的程度,识别无效但无害的行为,并且在参与者之间表现出更高的一致性。此外,提供进度信号并不需要额外的工作量和时间。我们的工作还贡献了一个包含40个非专家演示的数据库,观察到这些演示具有多策略和次优特性,次优性不仅源于遥控操作错误,还包括探索性行为和尝试。该数据集可在https://github.com/TeachingwithProgress/Non-Expert_Demonstrations获取。
🔬 方法详解
问题定义:本研究旨在解决现有机器人教学中缺乏有效反馈信号的问题,导致学习效率低下和人机交互体验不佳。
核心思路:提出了一种新的教学信号——进度,设计用于表示任务的完成百分比,以增强人类教师与机器人之间的互动和反馈。
技术框架:研究通过两项在线实验和一项公共空间研究,收集参与者对进度信号的反馈,分析其在任务完成度、行为识别等方面的表现。
关键创新:进度信号作为一种新的反馈机制,能够有效指示任务执行的成功与否,并在参与者之间表现出更高的一致性,区别于传统的反馈方式。
关键设计:研究中未详细描述具体的参数设置和网络结构,但强调进度信号的引入不增加额外的工作量和时间,且通过实验验证了其有效性。
🖼️ 关键图片

📊 实验亮点
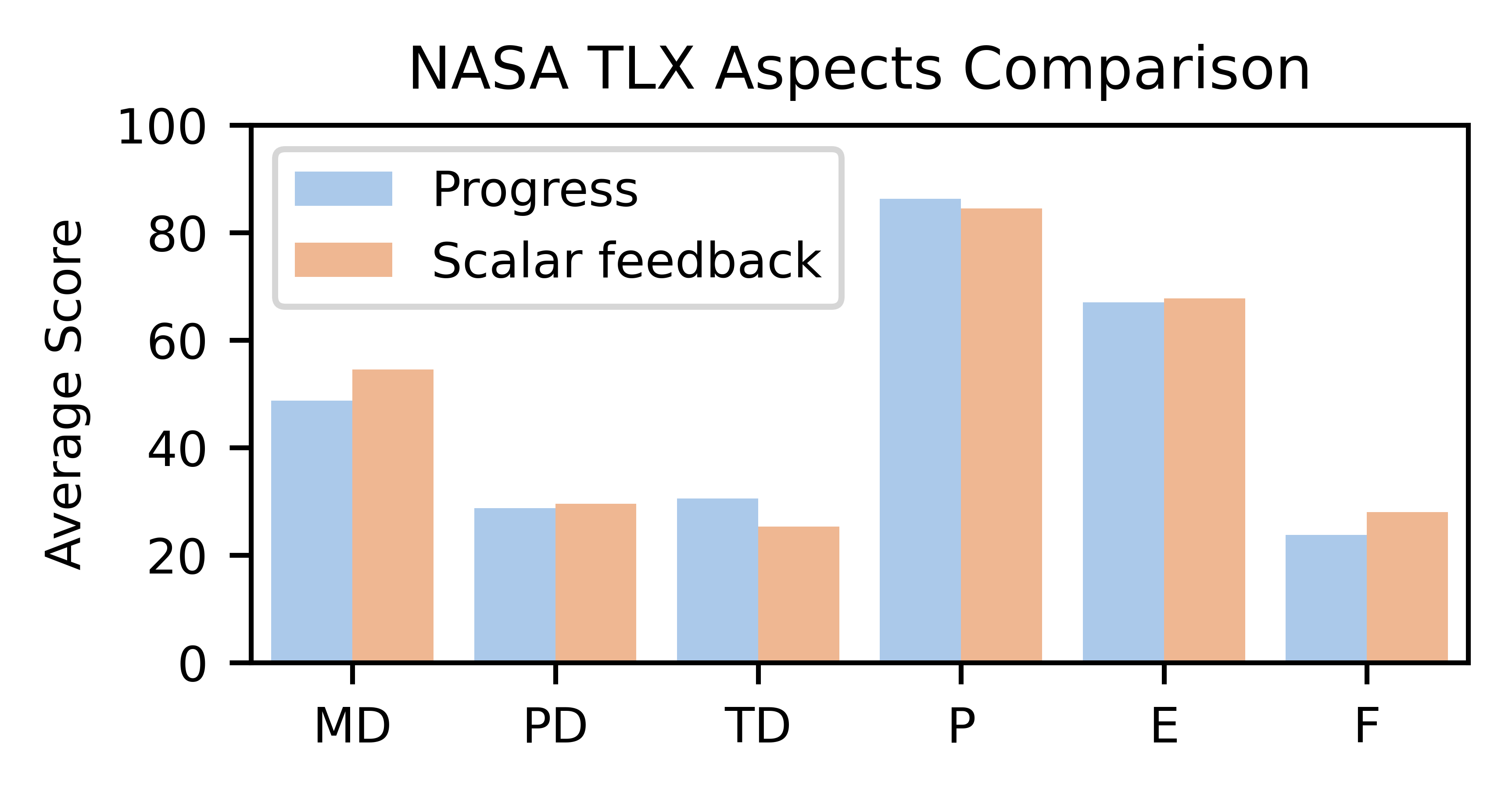
实验结果显示,进度信号能够有效指示任务的成功执行,反映任务完成程度,并且在参与者之间表现出一致性。与传统方法相比,进度信号的引入不增加额外的工作量和时间,提升了人机交互的效率。
🎯 应用场景
该研究的进度信号可广泛应用于机器人教学、智能助手和人机交互系统等领域,提升机器人学习效率和用户体验。未来,进度信号的应用可能推动更智能的教学系统发展,使机器人能够更好地理解和适应人类的教学方式。
📄 摘要(原文)
Enhancing the expressiveness of human teaching is vital for both improving robots' learning from humans and the human-teaching-robot experience. In this work, we characterize and test a little-used teaching signal: \textit{progress}, designed to represent the completion percentage of a task. We conducted two online studies with 76 crowd-sourced participants and one public space study with 40 non-expert participants to validate the capability of this progress signal. We find that progress indicates whether the task is successfully performed, reflects the degree of task completion, identifies unproductive but harmless behaviors, and is likely to be more consistent across participants. Furthermore, our results show that giving progress does not require extra workload and time. An additional contribution of our work is a dataset of 40 non-expert demonstrations from the public space study through an ice cream topping-adding task, which we observe to be multi-policy and sub-optimal, with sub-optimality not only from teleoperation errors but also from exploratory actions and attempts. The dataset is available at https://github.com/TeachingwithProgress/Non-Expert_Demonstrations.