Design and Central Pattern Generator Control of a New Transformable Wheel-Legged Robot
作者: Tyler Bishop, Keran Ye, Konstantinos Karydis
分类: cs.RO
发布日期: 2024-07-04
备注: ICRA 2024 in print
💡 一句话要点
提出一种新型轮腿式变形机器人,并设计基于中央模式发生器的运动控制器
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轮腿式机器人 中央模式发生器 CPG控制 变形机构 运动控制
📋 核心要点
- 现有轮腿式机器人在复杂地形适应性方面存在挑战,需要更灵活的运动控制策略。
- 论文提出一种基于中央模式发生器(CPG)的控制方法,通过映射振荡器状态到轮腿轨迹实现运动控制。
- 实验结果表明,该方法能够有效控制轮腿式变形机器人在平坦地面、不平坦地形和障碍物上运动。
📝 摘要(中文)
本文介绍了一种新型轮腿式机器人,并开发了基于中央模式发生器(CPG)的运动控制器,使机器人能够在各种地形上导航。论文考虑了一种可变形的腿-轮设计,并根据设计的函数,从关键运动特征方面对其进行了表征。基于同轴轮毂驱动的广义四杆机构进行了运动学分析。该分析用于设计中央模式发生器,通过将振荡器状态映射到轮腿轨迹并在振荡器网络中实现差速转向来控制机器人。论文使用了三种振荡器模型作为CPG的基础,并在一定范围的输入上比较了它们的性能。基于CPG的控制器用于驱动开发的机器人原型在平坦地面和障碍物上行驶。还进行了额外的模拟测试,用于不平坦地形的导航和障碍物攀爬。结果表明了CPG控制在可变形轮腿式机器人中的有效性。
🔬 方法详解
问题定义:现有轮腿式机器人在复杂地形下的运动控制面临挑战,尤其是在地形变化剧烈或存在障碍物时,需要能够灵活适应的控制策略。传统的控制方法可能难以实现平稳高效的运动,并且难以处理轮腿切换的协调问题。
核心思路:论文的核心思路是利用中央模式发生器(CPG)来生成机器人的运动轨迹。CPG是一种生物启发的控制方法,能够通过相互连接的振荡器网络产生周期性的运动模式。通过将CPG的振荡器状态映射到轮腿的运动轨迹,可以实现对机器人的运动控制,并能够自然地处理轮腿切换的协调问题。
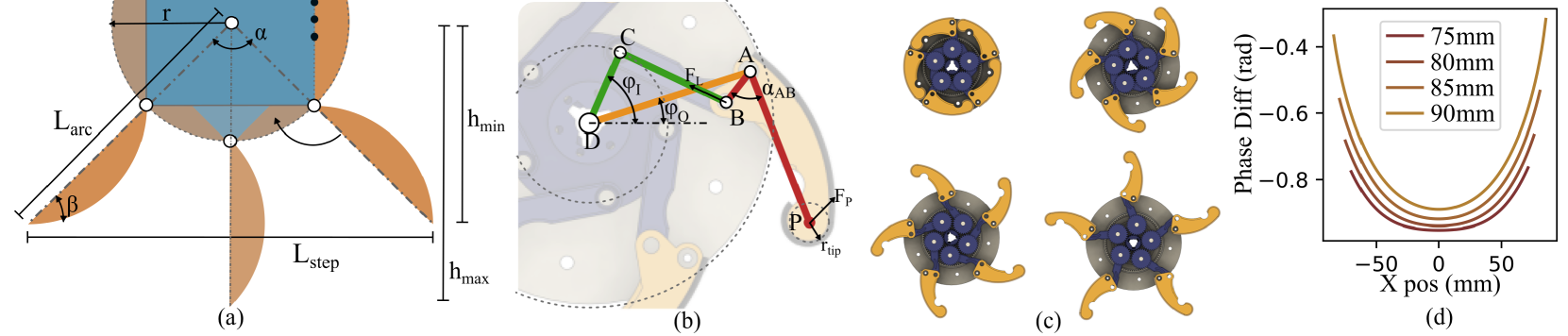
技术框架:整体框架包括以下几个主要模块:1) 轮腿机构设计:设计一种可变形的轮腿机构,使其能够在轮式和腿式运动模式之间切换。2) 运动学分析:对轮腿机构进行运动学分析,建立振荡器状态与轮腿轨迹之间的映射关系。3) CPG控制器设计:设计基于振荡器模型的CPG控制器,用于生成机器人的运动模式。4) 仿真与实验验证:在仿真环境中和实际机器人上验证CPG控制器的性能。
关键创新:论文的关键创新在于将CPG控制应用于轮腿式变形机器人,并提出了一种将振荡器状态映射到轮腿轨迹的方法。这种方法能够有效地控制机器人在复杂地形下的运动,并能够自然地处理轮腿切换的协调问题。此外,论文还比较了三种不同的振荡器模型在CPG控制中的性能。
关键设计:论文使用了三种振荡器模型作为CPG的基础,包括未知具体模型细节。通过调整振荡器的参数,可以控制机器人的运动速度和方向。论文还设计了一种差速转向机制,通过在振荡器网络中引入差异来实现机器人的转向。具体的参数设置和网络结构细节未知。
🖼️ 关键图片


📊 实验亮点
论文通过仿真和实验验证了CPG控制器的有效性。实验结果表明,该控制器能够驱动机器人原型在平坦地面和障碍物上行驶,并在不平坦地形的导航和障碍物攀爬方面表现出良好的性能。具体的性能数据和提升幅度未知。
🎯 应用场景
该研究成果可应用于复杂地形下的机器人导航、搜索救援、物流运输等领域。轮腿式变形机器人能够适应各种地形,具有广泛的应用前景。未来,可以进一步研究如何将该控制方法应用于更复杂的机器人系统,并提高机器人的自主性和智能化水平。
📄 摘要(原文)
This paper introduces a new wheel-legged robot and develops motion controllers based on central pattern generators (CPGs) for the robot to navigate over a range of terrains. A transformable leg-wheel design is considered and characterized in terms of key locomotion characteristics as a function of the design. Kinematic analysis is conducted based on a generalized four-bar mechanism driven by a coaxial hub arrangement. The analysis is used to inform the design of a central pattern generator to control the robot by mapping oscillator states to wheel-leg trajectories and implementing differential steering within the oscillator network. Three oscillator models are used as the basis of the CPGs, and their performance is compared over a range of inputs. The CPG-based controller is used to drive the developed robot prototype on level ground and over obstacles. Additional simulated tests are performed for uneven terrain negotiation and obstacle climbing. Results demonstrate the effectiveness of CPG control in transformable wheel-legged robots.