Learning Granular Media Avalanche Behavior for Indirectly Manipulating Obstacles on a Granular Slope
作者: Haodi Hu, Feifei Qian, Daniel Seita
分类: cs.RO
发布日期: 2024-07-02 (更新: 2024-10-14)
备注: Accepted to CoRL 2024
💡 一句话要点
利用沙坡雪崩动力学,间接操纵移动机器人环境中的障碍物
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 沙坡运动 雪崩动力学 机器人操纵 视觉Transformer 间接控制
📋 核心要点
- 腿式机器人在沙坡上运动面临挑战,因为沙质介质动力学复杂且缺乏稳定的支撑表面。
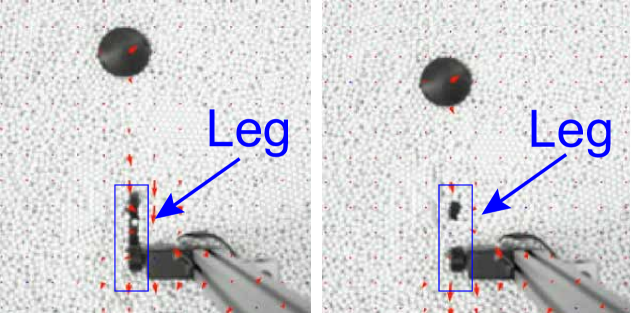
- 该方法利用雪崩动力学,通过机器人挖掘动作间接操纵沙坡上的物体,辅助机器人运动。
- 实验结果表明,该模型能准确预测物体运动,在多种操纵任务中成功率超过80%,并能推广到不同物理属性的物体。
📝 摘要(中文)
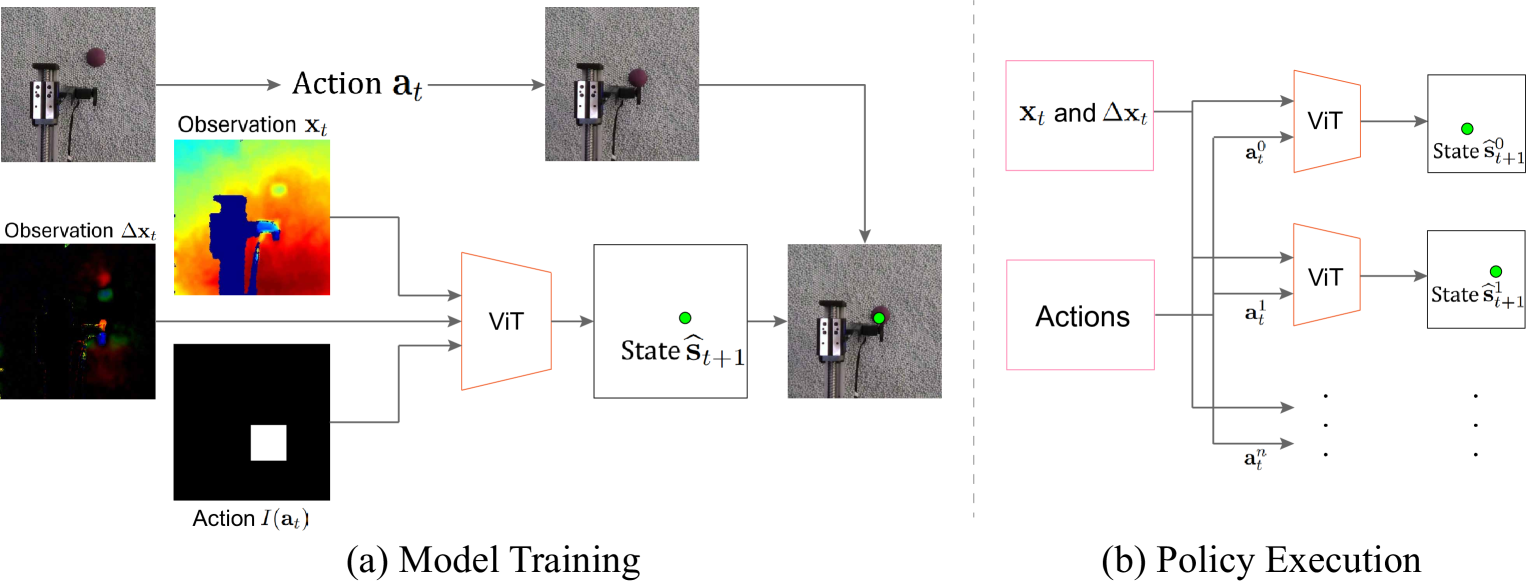
本文提出了一种新颖的方法,利用雪崩动力学来间接操纵沙坡上的物体,从而帮助腿式机器人在沙坡上运动。由于沙质介质的复杂动力学以及缺乏固体表面会阻碍运动,腿式机器人在沙坡上行走极具挑战性。受自然界幽灵蟹和其他生物的启发,一种有前景的策略是战略性地与岩石、碎片和其他障碍物相互作用,以促进运动。我们使用 Vision Transformer (ViT) 来处理沙质动力学和机器人挖掘动作的图像表示,并预测物体的移动。然后,我们使用预测结果来确定要执行的腿部挖掘动作。我们从 100 个真实的物理试验中收集训练数据,并在测试时将训练好的模型部署到新的环境中。实验结果表明,我们的模型可以准确预测物体的运动,并在各种具有多达四个障碍物的操纵任务中实现 ≥ 80% 的成功率,并且还可以推广到具有不同物理属性的物体。据我们所知,这是第一篇利用沙质介质雪崩动力学来间接操纵沙坡上物体的论文。
🔬 方法详解
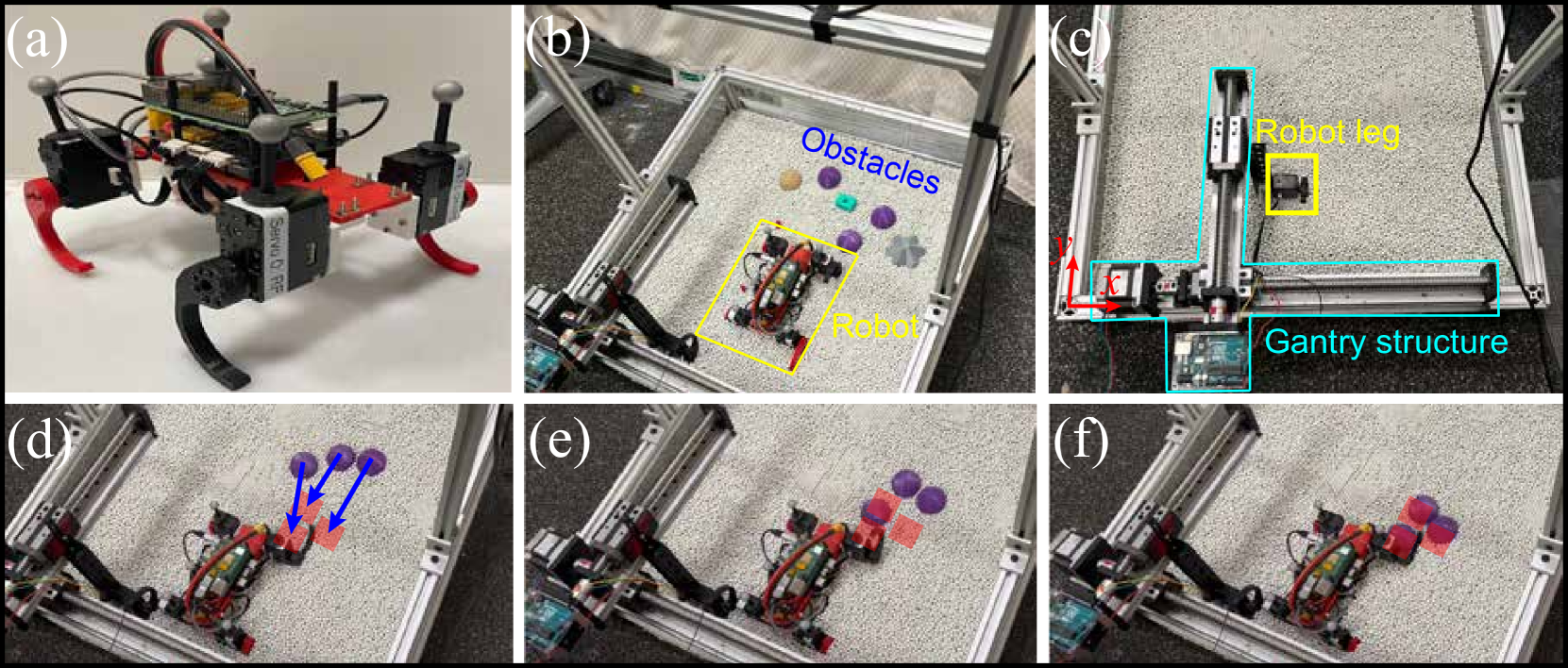
问题定义:该论文旨在解决腿式机器人在沙坡等松散介质上运动的难题。现有的方法难以适应沙坡复杂且动态的环境,缺乏有效的策略来利用环境中的障碍物辅助运动。因此,如何让机器人在沙坡上有效地操纵物体,从而改善其运动能力,是本文要解决的核心问题。
核心思路:论文的核心思路是利用沙坡的雪崩效应,通过控制机器人腿部的挖掘动作,间接操纵目标物体的位置。这种方法模仿了自然界中一些生物(如幽灵蟹)的行为,它们会策略性地与环境中的物体互动来辅助移动。通过预测挖掘动作引起的物体运动,机器人可以选择合适的动作来实现目标物体的定位。
技术框架:整体框架包含数据采集、模型训练和动作执行三个主要阶段。首先,通过真实的物理实验收集沙坡动力学和机器人挖掘动作的数据。然后,使用 Vision Transformer (ViT) 模型对这些数据进行训练,学习挖掘动作与物体运动之间的关系。最后,在测试环境中,机器人利用训练好的 ViT 模型预测不同挖掘动作对物体运动的影响,并选择最优的动作来执行。
关键创新:该论文的关键创新在于将沙坡的雪崩动力学与机器人操纵任务相结合,提出了一种间接操纵物体的新方法。与传统的直接操纵方法不同,该方法利用沙坡的自然属性,通过挖掘动作引发雪崩,从而实现对物体的间接控制。这种方法更适应沙坡等不确定性环境,并且可以减少机器人与物体之间的直接接触,降低操纵难度。
关键设计:论文的关键设计包括:1) 使用 Vision Transformer (ViT) 模型来处理图像数据,提取沙坡动力学和机器人动作的特征;2) 通过大量的真实物理实验来收集训练数据,保证模型的泛化能力;3) 设计了多种操纵任务,包括移动、旋转和堆叠物体等,以评估模型的性能;4) 成功率作为评估指标,量化了模型在不同任务中的表现。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该模型在各种操纵任务中实现了较高的成功率(≥ 80%),证明了其有效性。此外,该模型还能够推广到具有不同物理属性的物体,表明其具有较强的泛化能力。与没有使用雪崩动力学的方法相比,该方法在沙坡上的物体操纵方面取得了显著的性能提升。
🎯 应用场景
该研究成果可应用于腿式机器人在复杂地形(如沙地、雪地、泥地)上的自主导航和操作。例如,可用于灾后救援,帮助机器人在废墟中移动障碍物,搜寻幸存者;也可用于行星探测,使机器人能够在火星等星球的松散表面上进行科学考察和资源勘探。此外,该方法还可为其他类型的机器人(如履带式机器人)在类似环境中的运动提供借鉴。
📄 摘要(原文)
Legged robot locomotion on sand slopes is challenging due to the complex dynamics of granular media and how the lack of solid surfaces can hinder locomotion. A promising strategy, inspired by ghost crabs and other organisms in nature, is to strategically interact with rocks, debris, and other obstacles to facilitate movement. To provide legged robots with this ability, we present a novel approach that leverages avalanche dynamics to indirectly manipulate objects on a granular slope. We use a Vision Transformer (ViT) to process image representations of granular dynamics and robot excavation actions. The ViT predicts object movement, which we use to determine which leg excavation action to execute. We collect training data from 100 real physical trials and, at test time, deploy our trained model in novel settings. Experimental results suggest that our model can accurately predict object movements and achieve a success rate $\geq 80\%$ in a variety of manipulation tasks with up to four obstacles, and can also generalize to objects with different physics properties. To our knowledge, this is the first paper to leverage granular media avalanche dynamics to indirectly manipulate objects on granular slopes. Supplementary material is available at https://sites.google.com/view/grain-corl2024/home.