A Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk Trajectory Generation
作者: Linzhu Yue, Lingwei Zhang, Zhitao Song, Hongbo Zhang, Jinhu Dong, Xuanqi Zeng, Yun-Hui Liu
分类: cs.RO
发布日期: 2024-06-30
备注: IROS2024 paper,7 pages,8 figures
💡 一句话要点
提出基于虚模型控制和最小加加速度轨迹生成的快速全向四足跳跃框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 四足机器人 全向跳跃 虚模型控制 最小加加速度轨迹 全身控制 实时控制 运动规划
📋 核心要点
- 四足机器人敏捷性受限于复杂动力学和冲击接触,尤其是在快速规划和执行全向跳跃轨迹时。
- 提出一种基于最小加加速度轨迹生成和虚模型控制的框架,实现快速、全向跳跃。
- 在Mini Cheetah机器人上验证,成功实现全向跳跃,平均轨迹生成和跟踪时间仅50微秒。
📝 摘要(中文)
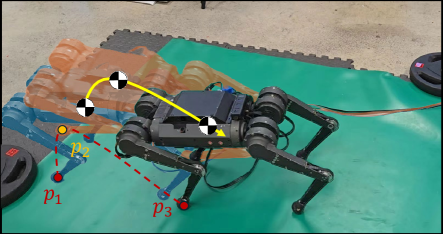
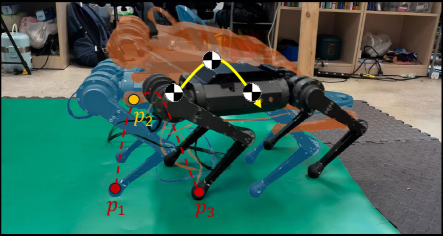
本文提出了一种新的框架,旨在实现四足机器人快速、全向跳跃的能力。由于涉及复杂的动力学,尤其是在考虑显著的冲击接触时,快速、实时地规划和执行全向跳跃轨迹极具挑战性。该框架利用最小加加速度技术高效生成跳跃轨迹,利用其解析解确保数值稳定性和动态兼容性,同时消耗最少的计算资源。采用虚模型控制,构建二次规划(QP)优化问题,以在跳跃阶段精确跟踪质心(CoM)轨迹。全身控制策略有助于实现精确且柔顺的着陆运动。此外,不同的跳跃阶段由时间表触发。通过在开源Mini Cheetah机器人的增强版本上实施,验证了该框架的有效性。成功执行了包括向前、向后和其他方向的全向跳跃,展示了机器人执行快速和连续跳跃的能力,平均轨迹生成和跟踪求解时间仅为50微秒。
🔬 方法详解
问题定义:四足机器人实现快速、全向跳跃面临着复杂动力学和冲击接触的挑战。现有的方法可能计算量大,难以保证实时性,或者难以处理复杂的着陆过程。因此,需要一个能够快速生成轨迹、精确跟踪质心、并实现柔顺着陆的框架。
核心思路:该论文的核心思路是结合最小加加速度轨迹生成、虚模型控制和全身控制策略,实现快速、精确和稳定的全向跳跃。最小加加速度轨迹生成保证了轨迹的平滑性,虚模型控制实现了质心的精确跟踪,全身控制策略则保证了着陆的柔顺性。
技术框架:该框架主要包含以下几个模块:1) 最小加加速度轨迹生成器:用于生成跳跃过程中的质心轨迹。2) 虚模型控制器:用于跟踪质心轨迹,并通过二次规划优化问题计算所需的控制力。3) 全身控制器:用于实现精确和柔顺的着陆运动。4) 时间调度器:用于触发不同的跳跃阶段。整体流程是:首先,根据期望的跳跃方向和距离,由最小加加速度轨迹生成器生成质心轨迹;然后,虚模型控制器根据质心轨迹计算所需的控制力;最后,全身控制器根据控制力控制机器人的关节运动,实现跳跃和着陆。
关键创新:该论文的关键创新在于将最小加加速度轨迹生成、虚模型控制和全身控制策略有效地结合起来,实现快速、精确和稳定的全向跳跃。特别地,利用最小加加速度轨迹的解析解,大大降低了计算量,保证了实时性。
关键设计:1) 最小加加速度轨迹生成器:采用五次多项式来描述质心轨迹,通过约束初始和最终位置、速度和加速度,求解多项式的系数。2) 虚模型控制器:将机器人简化为一个虚拟的弹簧-阻尼系统,通过调整弹簧和阻尼系数,实现对质心轨迹的精确跟踪。3) 全身控制器:采用基于力矩的控制方法,通过优化关节力矩,实现精确和柔顺的着陆。
🖼️ 关键图片

📊 实验亮点
该框架在增强版Mini Cheetah机器人上成功实现了全向跳跃,包括向前、向后和其他方向。实验结果表明,该框架能够快速生成和跟踪跳跃轨迹,平均轨迹生成和跟踪求解时间仅为50微秒。这表明该框架具有很高的实时性,可以满足实际应用的需求。
🎯 应用场景
该研究成果可应用于搜救、侦察、物流等领域。具备全向跳跃能力的四足机器人可以在复杂地形中快速移动,执行各种任务。例如,在灾难现场,机器人可以跳跃过障碍物,搜寻幸存者;在仓库中,机器人可以跳跃到不同的货架上,搬运货物。此外,该研究还可以为其他类型的机器人提供参考,促进机器人技术的进一步发展。
📄 摘要(原文)
Exploring the limits of quadruped robot agility, particularly in the context of rapid and real-time planning and execution of omnidirectional jump trajectories, presents significant challenges due to the complex dynamics involved, especially when considering significant impulse contacts. This paper introduces a new framework to enable fast, omnidirectional jumping capabilities for quadruped robots. Utilizing minimum jerk technology, the proposed framework efficiently generates jump trajectories that exploit its analytical solutions, ensuring numerical stability and dynamic compatibility with minimal computational resources. The virtual model control is employed to formulate a Quadratic Programming (QP) optimization problem to accurately track the Center of Mass (CoM) trajectories during the jump phase. The whole-body control strategies facilitate precise and compliant landing motion. Moreover, the different jumping phase is triggered by time-schedule. The framework's efficacy is demonstrated through its implementation on an enhanced version of the open-source Mini Cheetah robot. Omnidirectional jumps-including forward, backward, and other directional-were successfully executed, showcasing the robot's capability to perform rapid and consecutive jumps with an average trajectory generation and tracking solution time of merely 50 microseconds.