SPITE: Simple Polyhedral Intersection Techniques for modified Environments
作者: Stav Ashur, Maria Lusardi, Marta Markowicz, James Motes, Marco Morales, Sariel Har-Peled, Nancy M. Amato
分类: cs.RO
发布日期: 2024-06-28
💡 一句话要点
SPITE:用于动态环境的简单多面体相交技术,加速运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 动态环境 构型空间 扫掠体积 计算几何
📋 核心要点
- 动态环境下的运动规划面临挑战,传统概率路线图等方法因环境变化导致节点和边失效。
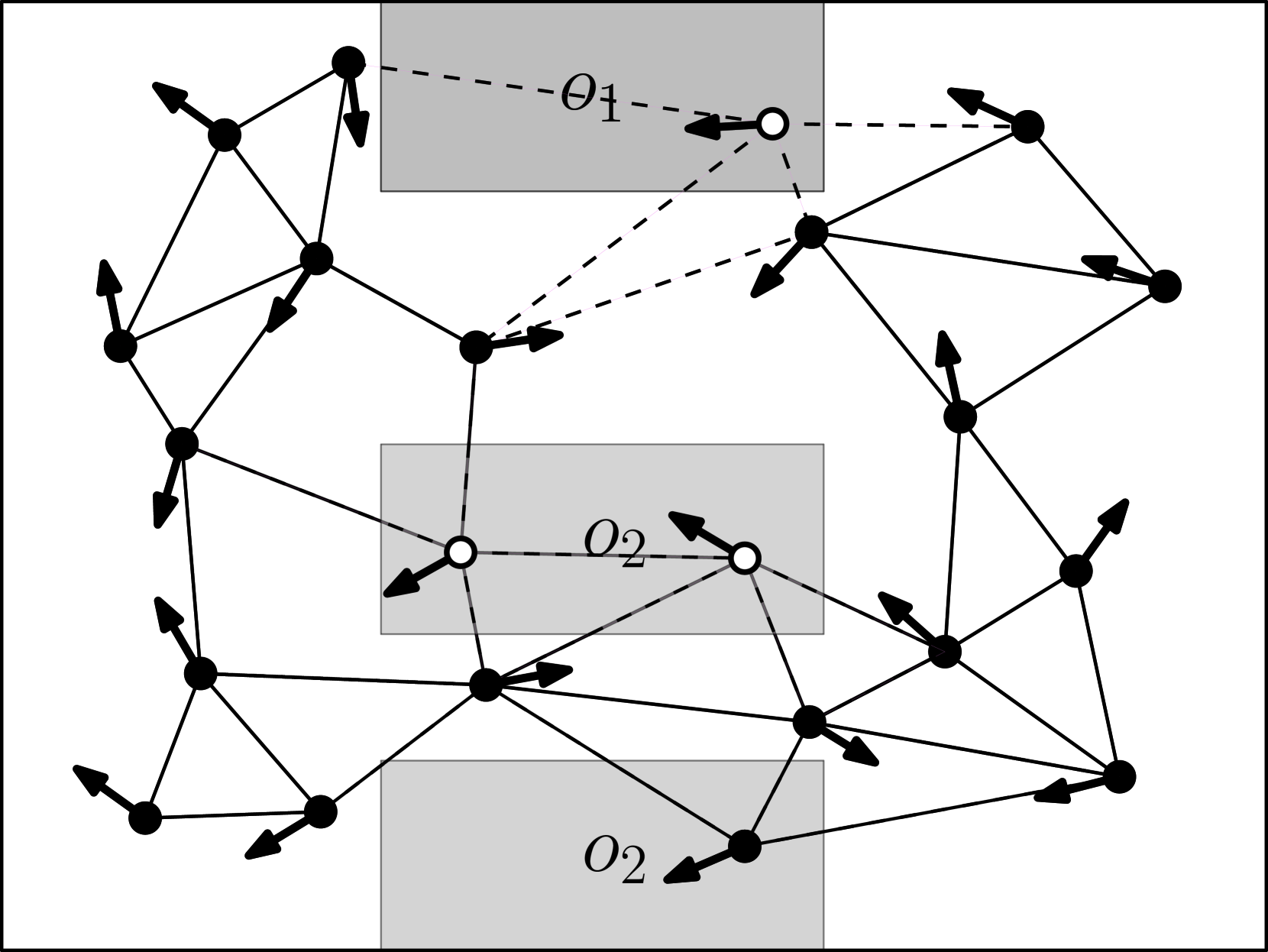
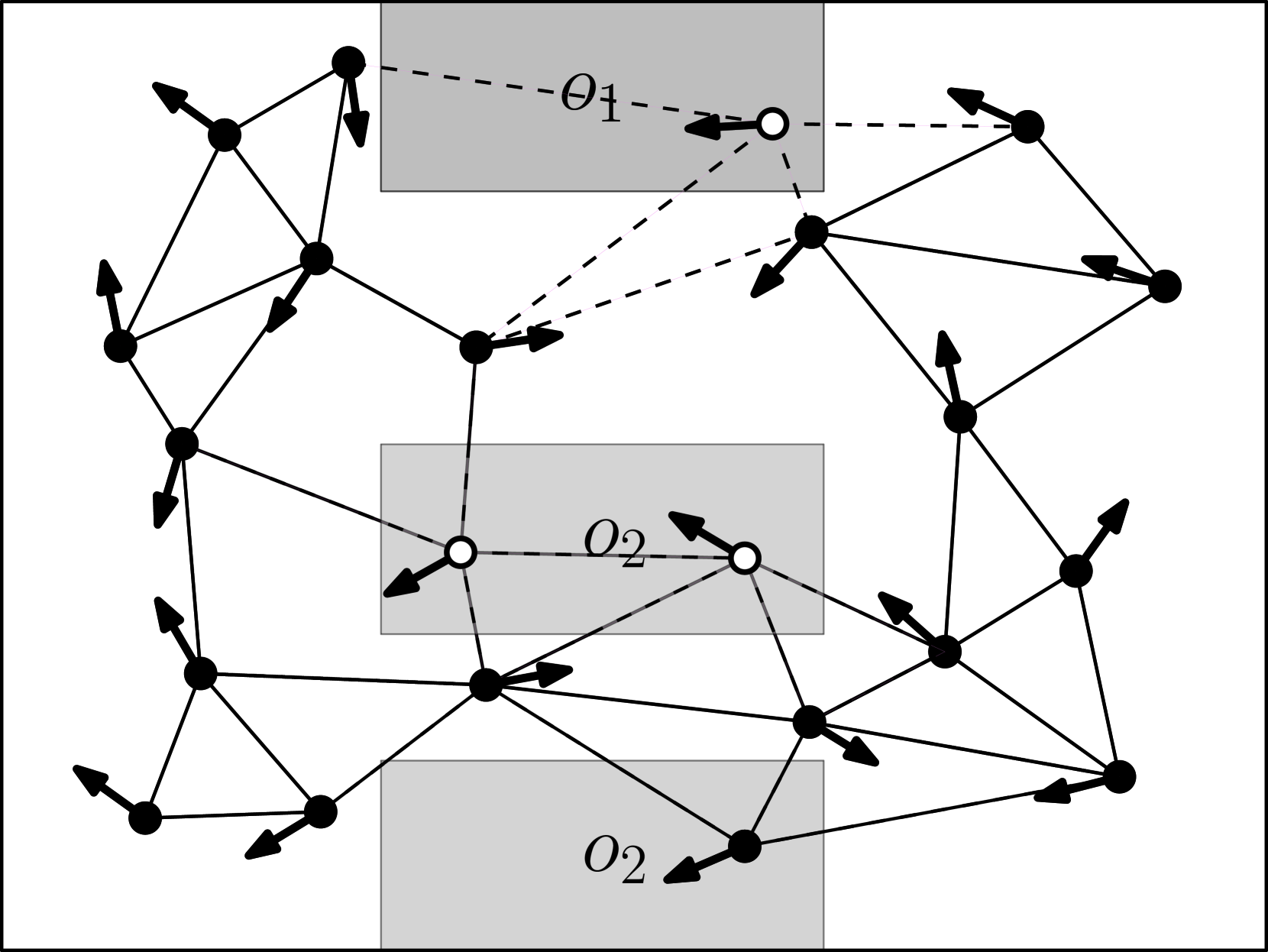
- 论文提出将构型空间图转换为动态数据结构,利用计算几何方法更新节点和边的有效性。
- 实验表明,该方法更新速度提升10-40%,查询速度提升高达60%,预处理时间从数小时缩短到数分钟。
📝 摘要(中文)
在动态环境中进行运动规划是一项具有挑战性的任务,因为它将运动规划问题本身的难度与不断变化的环境相结合。这使得诸如概率路线图之类的一些算法方法不太可行,因为节点和边可能会由于这些变化而失效。本文提出了一种将任何构型空间图(例如路线图)转换为动态数据结构的方法,该结构能够响应障碍物位置的离散变化来更新其节点和边的有效性。我们使用计算几何的方法来计算构型空间点和曲线的3D扫掠体积近似,从而实现比以前的算法快10-40%的更新速度,以及高达60%的运动规划查询速度,同时需要明显更短的预处理阶段,只需几分钟,而竞争方法需要数小时才能实现类似的更新时间。
🔬 方法详解
问题定义:论文旨在解决动态环境中运动规划的效率问题。现有方法,如概率路线图,在环境发生变化时需要重新计算,效率低下。痛点在于如何快速更新构型空间图,以适应障碍物位置的离散变化。
核心思路:核心思路是利用计算几何中的扫掠体积近似方法,将构型空间中的点和曲线表示为3D体积。当环境中的障碍物位置发生变化时,只需检查这些扫掠体积是否与新的障碍物相交,从而快速判断节点和边的有效性。这种方法避免了重新计算整个构型空间图的需要。
技术框架:整体框架包括以下几个阶段:1) 预处理阶段:计算构型空间中关键点和路径的扫掠体积近似。2) 环境更新阶段:当障碍物位置发生变化时,快速检查扫掠体积与新障碍物的相交情况,更新构型空间图的有效性。3) 运动规划查询阶段:利用更新后的构型空间图进行运动规划查询。
关键创新:最重要的创新在于使用扫掠体积近似来表示构型空间中的点和曲线。与传统的精确计算方法相比,扫掠体积近似可以显著降低计算复杂度,从而实现更快的更新速度。此外,该方法的预处理时间也大大缩短。
关键设计:关键设计包括:1) 扫掠体积的近似方法选择,需要在精度和计算效率之间进行权衡。2) 相交检测算法的选择,需要考虑算法的效率和鲁棒性。3) 构型空间图的存储和更新方式,需要保证数据结构的动态性和查询效率。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在更新速度上比之前的算法快10-40%,在运动规划查询速度上快高达60%。更重要的是,预处理时间从竞争方法所需的数小时缩短到仅需几分钟。这些结果表明,该方法在动态环境下的运动规划方面具有显著的优势。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、游戏AI等领域。在这些场景中,环境经常发生变化,例如行人移动、车辆行驶、障碍物出现等。该方法能够快速适应这些变化,提高运动规划的效率和鲁棒性,从而提升系统的整体性能和用户体验。未来,该方法可以进一步扩展到更复杂的动态环境和更高维度的构型空间。
📄 摘要(原文)
Motion planning in modified environments is a challenging task, as it compounds the innate difficulty of the motion planning problem with a changing environment. This renders some algorithmic methods such as probabilistic roadmaps less viable, as nodes and edges may become invalid as a result of these changes. In this paper, we present a method of transforming any configuration space graph, such as a roadmap, to a dynamic data structure capable of updating the validity of its nodes and edges in response to discrete changes in obstacle positions. We use methods from computational geometry to compute 3D swept volume approximations of configuration space points and curves to achieve 10-40 percent faster updates and up to 60 percent faster motion planning queries than previous algorithms while requiring a significantly shorter pre-processing phase, requiring minutes instead of hours needed by the competing method to achieve somewhat similar update times.