SMPLOlympics: Sports Environments for Physically Simulated Humanoids
作者: Zhengyi Luo, Jiashun Wang, Kangni Liu, Haotian Zhang, Chen Tessler, Jingbo Wang, Ye Yuan, Jinkun Cao, Zihui Lin, Fengyi Wang, Jessica Hodgins, Kris Kitani
分类: cs.RO, cs.CV, cs.GR
发布日期: 2024-06-28
备注: Project page: https://smplolympics.github.io/SMPLOlympics
💡 一句话要点
SMPLOlympics:为物理模拟人形机器人设计的体育运动环境
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱六:视频提取与匹配 (Video Extraction)
关键词: 人形机器人 强化学习 运动控制 物理模拟 SMPL模型
📋 核心要点
- 现有强化学习算法在复杂物理环境中的运动控制方面面临挑战,缺乏标准化的测试平台。
- SMPLOlympics利用SMPL/SMPL-X模型,结合运动先验和简单奖励,使人形机器人能够学习各种体育运动。
- 实验表明,该方法能够在多种体育项目中生成类似人类的行为,为控制和动画领域提供参考。
📝 摘要(中文)
本文提出了SMPLOlympics,一个物理模拟环境集合,允许人形机器人在各种奥林匹克运动项目中竞争。体育运动模拟为评估和改进学习算法的能力提供了一个丰富且标准化的测试平台,这归功于体育活动的多样性和对体力的要求。由于人类已经在这些运动项目中竞争多年,因此存在大量关于实现更好性能的首选策略的现有知识。为了利用来自视频和动作捕捉的现有人类演示,我们将人形机器人设计为与视觉和图形社区广泛使用的SMPL和SMPL-X人体模型兼容。我们提供了一套独立的运动环境,包括高尔夫、标枪、跳高、跳远和跨栏,以及包括1v1和2v2比赛的竞技运动,如乒乓球、网球、击剑、拳击、足球和篮球。我们的分析表明,将强大的运动先验与简单的奖励相结合,可以在各种运动中产生类似人类的行为。通过提供统一的体育基准和状态与奖励设计的基线实现,我们希望SMPLOlympics能够帮助控制和动画社区实现类人且高性能的行为。
🔬 方法详解
问题定义:现有强化学习方法在复杂物理环境下的运动控制任务中,面临着训练难度大、泛化性差等问题。缺乏一个标准化的、多样化的体育运动环境,使得算法的评估和比较变得困难。此外,如何有效地利用人类运动数据来指导机器人学习也是一个挑战。
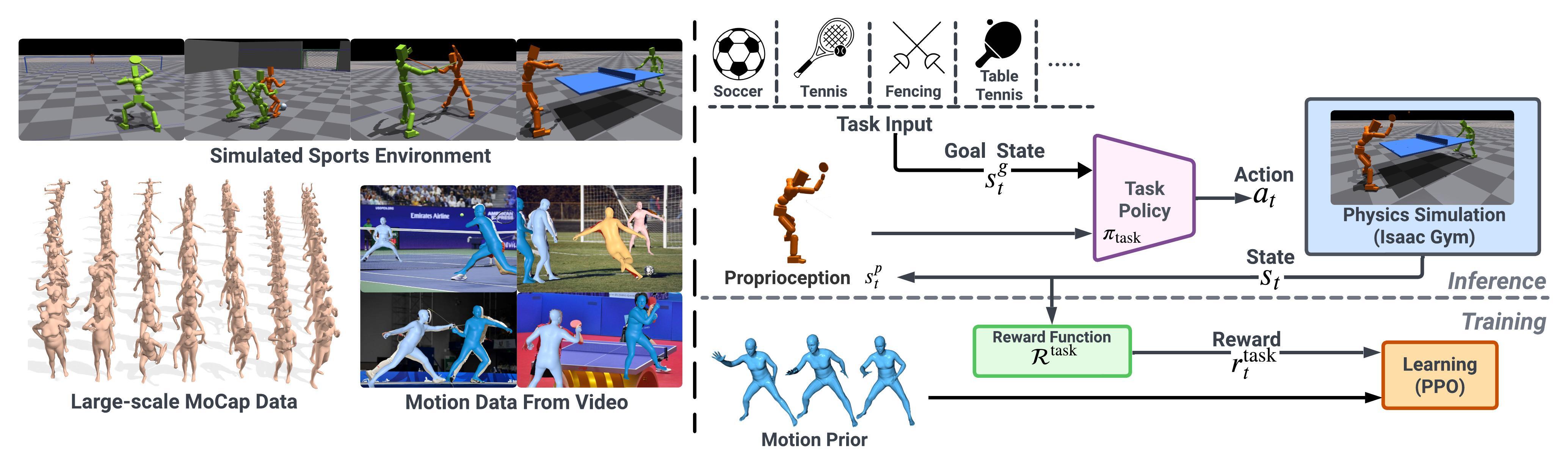
核心思路:SMPLOlympics的核心思路是构建一个基于物理引擎的体育运动模拟环境,并设计与SMPL/SMPL-X人体模型兼容的人形机器人。通过结合运动先验知识和简单的奖励函数,引导机器人学习类似人类的运动策略。这种方法旨在利用人类运动数据的优势,降低学习难度,并提高运动控制的性能。
技术框架:SMPLOlympics包含多个独立的体育运动环境,如高尔夫、标枪、跳高、跳远、跨栏、乒乓球、网球、击剑、拳击、足球和篮球。每个环境都包含一个基于物理引擎的模拟器和一个与SMPL/SMPL-X模型兼容的人形机器人。研究人员可以使用强化学习算法训练机器人在这些环境中完成特定的运动任务。该框架还提供了一套状态和奖励设计的基线实现,方便研究人员进行比较和改进。
关键创新:该论文的关键创新在于构建了一个标准化的、多样化的体育运动模拟环境,并设计了与SMPL/SMPL-X模型兼容的人形机器人。这使得研究人员可以方便地利用人类运动数据来指导机器人学习,并评估和比较不同的运动控制算法。此外,结合运动先验知识和简单的奖励函数,可以有效地降低学习难度,并提高运动控制的性能。
关键设计:在奖励函数设计方面,论文采用了简单的奖励函数,例如,鼓励机器人接近目标位置或保持平衡。在运动先验方面,论文利用了人类运动数据来初始化机器人的运动策略。具体的技术细节,例如参数设置、损失函数和网络结构,在论文中没有详细描述,可能需要参考相关的强化学习文献。
🖼️ 关键图片

📊 实验亮点
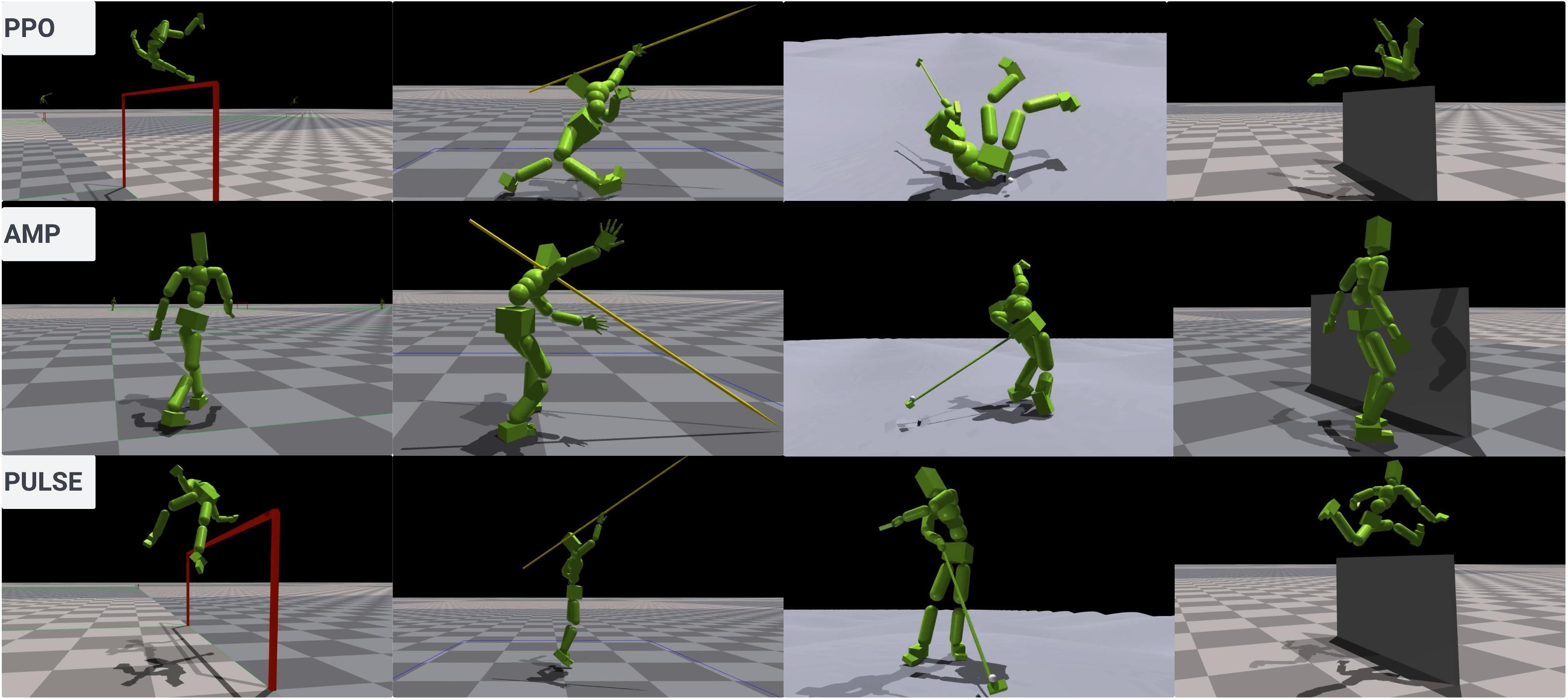
实验结果表明,通过结合运动先验和简单的奖励函数,SMPLOlympics能够在多种体育项目中生成类似人类的行为。例如,人形机器人可以学会打高尔夫、跳高、踢足球等。虽然论文中没有提供具体的性能数据和对比基线,但实验结果表明该方法具有一定的有效性,为控制和动画领域提供了一个有价值的基准。
🎯 应用场景
SMPLOlympics可应用于机器人运动控制、虚拟现实、游戏开发等领域。通过模拟体育运动,可以训练机器人完成复杂的运动任务,提高其在现实世界中的适应性和灵活性。此外,该平台还可以用于研究人类运动的机理,为运动科学提供参考。未来,该研究有望推动人形机器人在体育、娱乐、康复等领域的应用。
📄 摘要(原文)
We present SMPLOlympics, a collection of physically simulated environments that allow humanoids to compete in a variety of Olympic sports. Sports simulation offers a rich and standardized testing ground for evaluating and improving the capabilities of learning algorithms due to the diversity and physically demanding nature of athletic activities. As humans have been competing in these sports for many years, there is also a plethora of existing knowledge on the preferred strategy to achieve better performance. To leverage these existing human demonstrations from videos and motion capture, we design our humanoid to be compatible with the widely-used SMPL and SMPL-X human models from the vision and graphics community. We provide a suite of individual sports environments, including golf, javelin throw, high jump, long jump, and hurdling, as well as competitive sports, including both 1v1 and 2v2 games such as table tennis, tennis, fencing, boxing, soccer, and basketball. Our analysis shows that combining strong motion priors with simple rewards can result in human-like behavior in various sports. By providing a unified sports benchmark and baseline implementation of state and reward designs, we hope that SMPLOlympics can help the control and animation communities achieve human-like and performant behaviors.