ROS-LLM: A ROS framework for embodied AI with task feedback and structured reasoning
作者: Christopher E. Mower, Yuhui Wan, Hongzhan Yu, Antoine Grosnit, Jonas Gonzalez-Billandon, Matthieu Zimmer, Jinlong Wang, Xinyu Zhang, Yao Zhao, Anbang Zhai, Puze Liu, Daniel Palenicek, Davide Tateo, Cesar Cadena, Marco Hutter, Jan Peters, Guangjian Tian, Yuzheng Zhuang, Kun Shao, Xingyue Quan, Jianye Hao, Jun Wang, Haitham Bou-Ammar
分类: cs.RO, cs.AI
发布日期: 2024-06-28 (更新: 2024-07-12)
备注: This document contains 26 pages and 13 figures
🔗 代码/项目: GITHUB
💡 一句话要点
提出ROS-LLM框架,利用自然语言提示和ROS上下文信息实现具身智能任务。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人操作系统 大型语言模型 自然语言处理 具身智能 人机交互 模仿学习 行为树
📋 核心要点
- 现有机器人编程方法复杂,非专业人员难以使用,限制了机器人的广泛应用。
- ROS-LLM框架利用LLM理解自然语言指令,并将其转化为机器人可执行的ROS动作序列。
- 实验表明,该框架在长时程任务、桌面重排等场景中表现出鲁棒性、可扩展性和通用性。
📝 摘要(中文)
本文提出了一个框架,旨在通过自然语言提示和机器人操作系统(ROS)的上下文信息,实现非专业人员对机器人的直观编程。该系统集成了大型语言模型(LLM),使非专业人员能够通过聊天界面向系统表达任务需求。框架的关键特性包括:ROS与AI代理的集成,该AI代理连接到大量的开源和商业LLM;从LLM输出中自动提取行为并执行ROS动作/服务;支持三种行为模式(序列、行为树、状态机);通过模仿学习向可能的动作库中添加新的机器人动作;以及通过人类和环境反馈进行LLM反思。大量的实验验证了该框架的鲁棒性、可扩展性和多功能性,包括长时程任务、桌面重排和远程监督控制。为了方便采用我们的框架并支持结果的重现,我们已经开源了我们的代码。
🔬 方法详解
问题定义:论文旨在解决非专业人员难以进行机器人编程的问题。现有机器人编程方法通常需要专业的编程知识和对ROS等复杂系统的深入理解,这使得非专业人员难以快速有效地实现机器人任务。因此,如何降低机器人编程的门槛,让非专业人员也能轻松地控制机器人完成复杂任务,是本文要解决的核心问题。
核心思路:论文的核心思路是利用大型语言模型(LLM)的自然语言理解和生成能力,将用户的自然语言指令转化为机器人可以理解和执行的ROS动作序列。通过将LLM与ROS系统集成,用户可以使用自然语言与机器人进行交互,而无需编写复杂的代码。这种方法降低了机器人编程的门槛,使得非专业人员也能轻松地控制机器人。
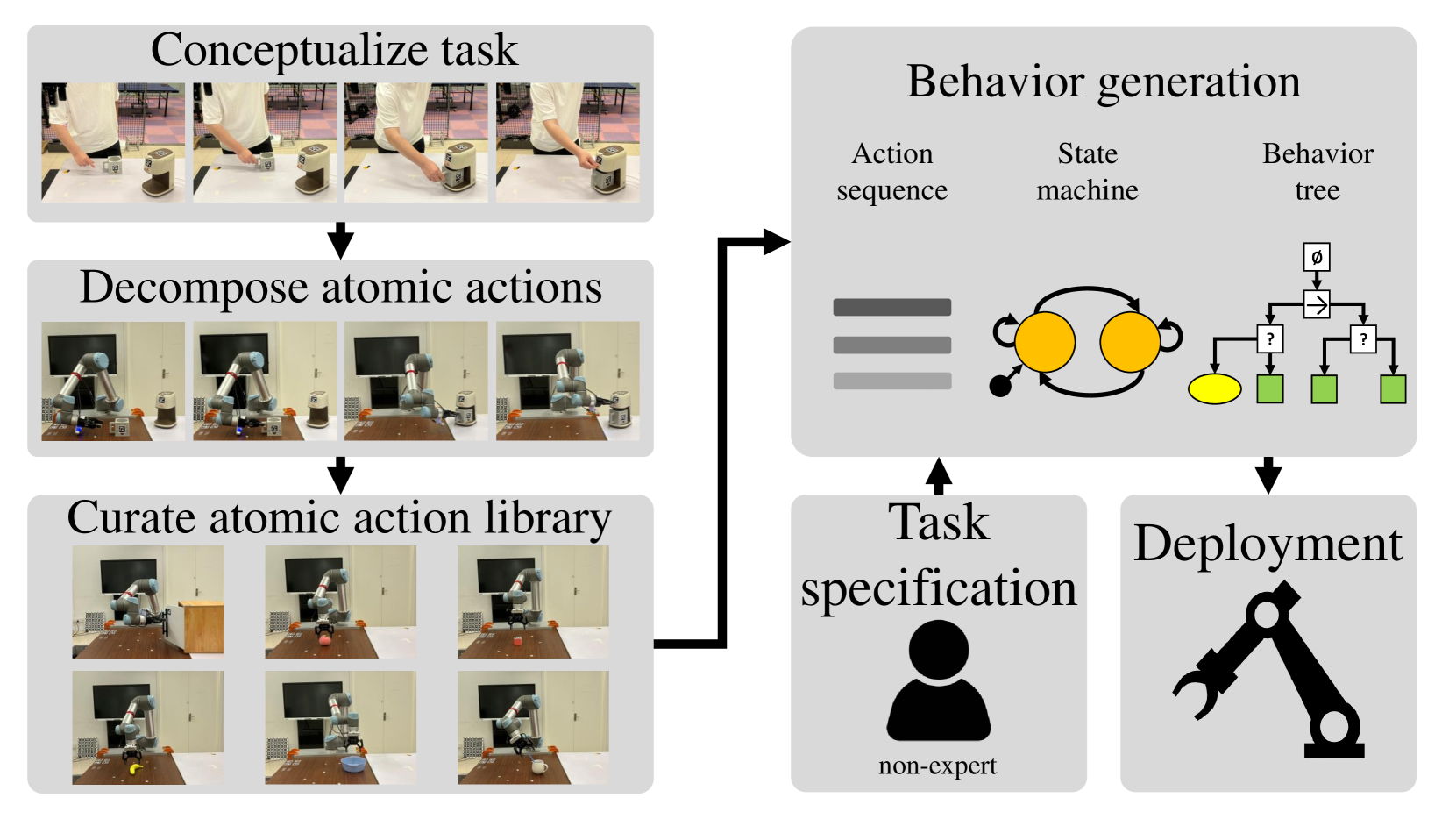
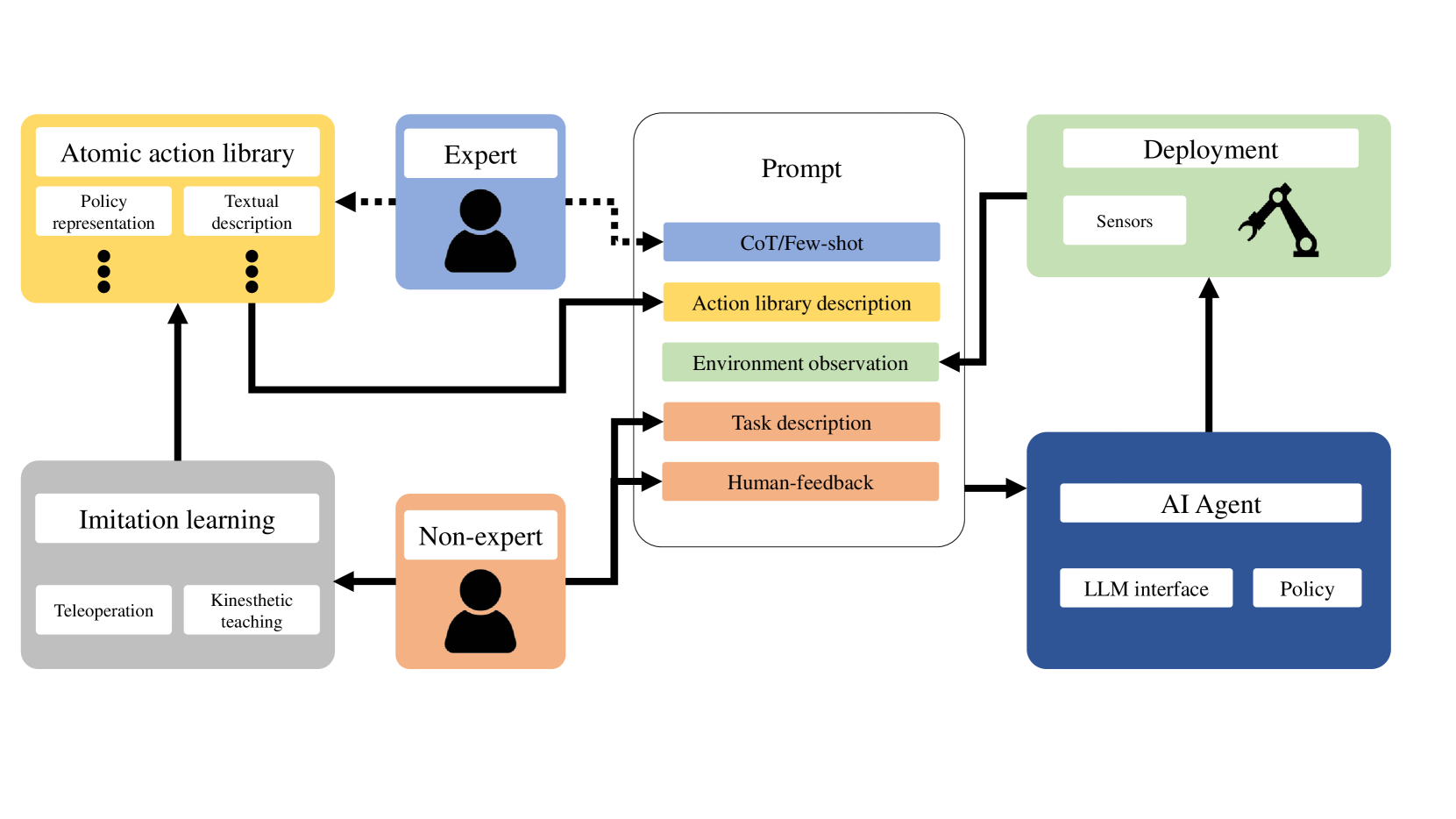
技术框架:ROS-LLM框架主要包含以下几个模块:1) 自然语言接口:用户通过聊天界面输入自然语言指令。2) LLM:LLM负责理解自然语言指令,并将其转化为机器人可以执行的动作序列。3) ROS接口:ROS接口负责将LLM生成的动作序列转化为ROS动作/服务,并控制机器人执行。4) 行为模式:支持序列、行为树、状态机三种行为模式,以适应不同的任务需求。5) 反馈机制:通过人类和环境反馈,对LLM进行反思和改进。
关键创新:该框架的关键创新在于将LLM与ROS系统深度集成,实现了自然语言驱动的机器人编程。与传统的机器人编程方法相比,该框架无需编写复杂的代码,降低了编程门槛。此外,该框架还支持多种行为模式和反馈机制,提高了机器人的鲁棒性和适应性。
关键设计:框架支持多种开源和商业LLM,用户可以根据自己的需求选择合适的LLM。框架采用模仿学习的方法,可以不断学习新的机器人动作,扩展机器人的能力。框架还设计了反馈机制,通过人类和环境反馈,对LLM进行反思和改进,提高机器人的性能。
🖼️ 关键图片

📊 实验亮点
实验结果表明,ROS-LLM框架在长时程任务、桌面重排和远程监督控制等多种场景下表现出良好的鲁棒性、可扩展性和通用性。例如,在桌面重排任务中,该框架能够成功地控制机器人完成复杂的物体抓取和放置操作。此外,该框架还支持通过人类和环境反馈进行LLM反思,进一步提高了机器人的性能。
🎯 应用场景
该研究成果可应用于各种需要人机协作的场景,例如智能家居、医疗辅助、工业自动化等。通过自然语言交互,用户可以轻松地控制机器人完成各种任务,提高工作效率和生活质量。未来,该技术有望推动机器人技术的普及和应用,使机器人更好地服务于人类。
📄 摘要(原文)
We present a framework for intuitive robot programming by non-experts, leveraging natural language prompts and contextual information from the Robot Operating System (ROS). Our system integrates large language models (LLMs), enabling non-experts to articulate task requirements to the system through a chat interface. Key features of the framework include: integration of ROS with an AI agent connected to a plethora of open-source and commercial LLMs, automatic extraction of a behavior from the LLM output and execution of ROS actions/services, support for three behavior modes (sequence, behavior tree, state machine), imitation learning for adding new robot actions to the library of possible actions, and LLM reflection via human and environment feedback. Extensive experiments validate the framework, showcasing robustness, scalability, and versatility in diverse scenarios, including long-horizon tasks, tabletop rearrangements, and remote supervisory control. To facilitate the adoption of our framework and support the reproduction of our results, we have made our code open-source. You can access it at: https://github.com/huawei-noah/HEBO/tree/master/ROSLLM.