LLCoach: Generating Robot Soccer Plans using Multi-Role Large Language Models
作者: Michele Brienza, Emanuele Musumeci, Vincenzo Suriani, Daniele Affinita, Andrea Pennisi, Daniele Nardi, Domenico Daniele Bloisi
分类: cs.RO
发布日期: 2024-06-26
备注: Accepted at 27th RoboCup International Symposium will be held on 22 July 2024, in Eindhoven, The Netherlands
💡 一句话要点
LLCoach:利用多角色大型语言模型生成机器人足球比赛策略
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人足球 大型语言模型 自主规划 多智能体系统 策略生成
📋 核心要点
- 现有机器人足球策略在动态环境中易失效,缺乏适应性和鲁棒性。
- 提出LLCoach,利用多角色LLM生成和优化机器人足球队策略,提升自主性。
- 实验表明,AI生成的策略在模拟比赛中表现良好,验证了LLM在策略生成方面的潜力。
📝 摘要(中文)
在人类环境中部署机器人需要先进的规划策略,尤其是在动态、非结构化环境中。RoboCup提供了一个这样的场景,即机器人足球比赛。在这种场景中,机器人必须使用预定义的行为进行操作,这些行为在不可预测的条件下可能会失败。本文介绍了一种大型语言模型(LLM)的新应用,旨在解决在这种环境中生成可行计划的挑战,特别是在RoboCup标准平台联赛(SPL)比赛中,机器人需要自主执行由个体智能体交互产生的足球策略。具体而言,我们提出了一种多角色方法,利用LLM的能力来生成和改进机器人足球队的计划。通过模拟多场比赛的实验评估证明了该方法的潜力,在这些比赛中,具有AI生成计划的机器人与运行人工构建代码的机器人进行对抗。
🔬 方法详解
问题定义:论文旨在解决RoboCup标准平台联赛(SPL)中,机器人足球队在动态、非结构化环境中自主生成有效策略的问题。现有方法依赖于人工设计的预定义行为,难以适应复杂多变的比赛情况,缺乏灵活性和鲁棒性。这些预定义行为在面对不可预测的条件时容易失效,导致机器人无法有效地执行任务。
核心思路:论文的核心思路是利用大型语言模型(LLM)的强大生成和推理能力,自动生成和优化机器人足球队的比赛策略。通过将LLM作为策略生成器,可以摆脱对人工设计的依赖,使机器人能够根据比赛的实时状态和对手的行为,动态地调整策略,从而提高其适应性和竞争力。
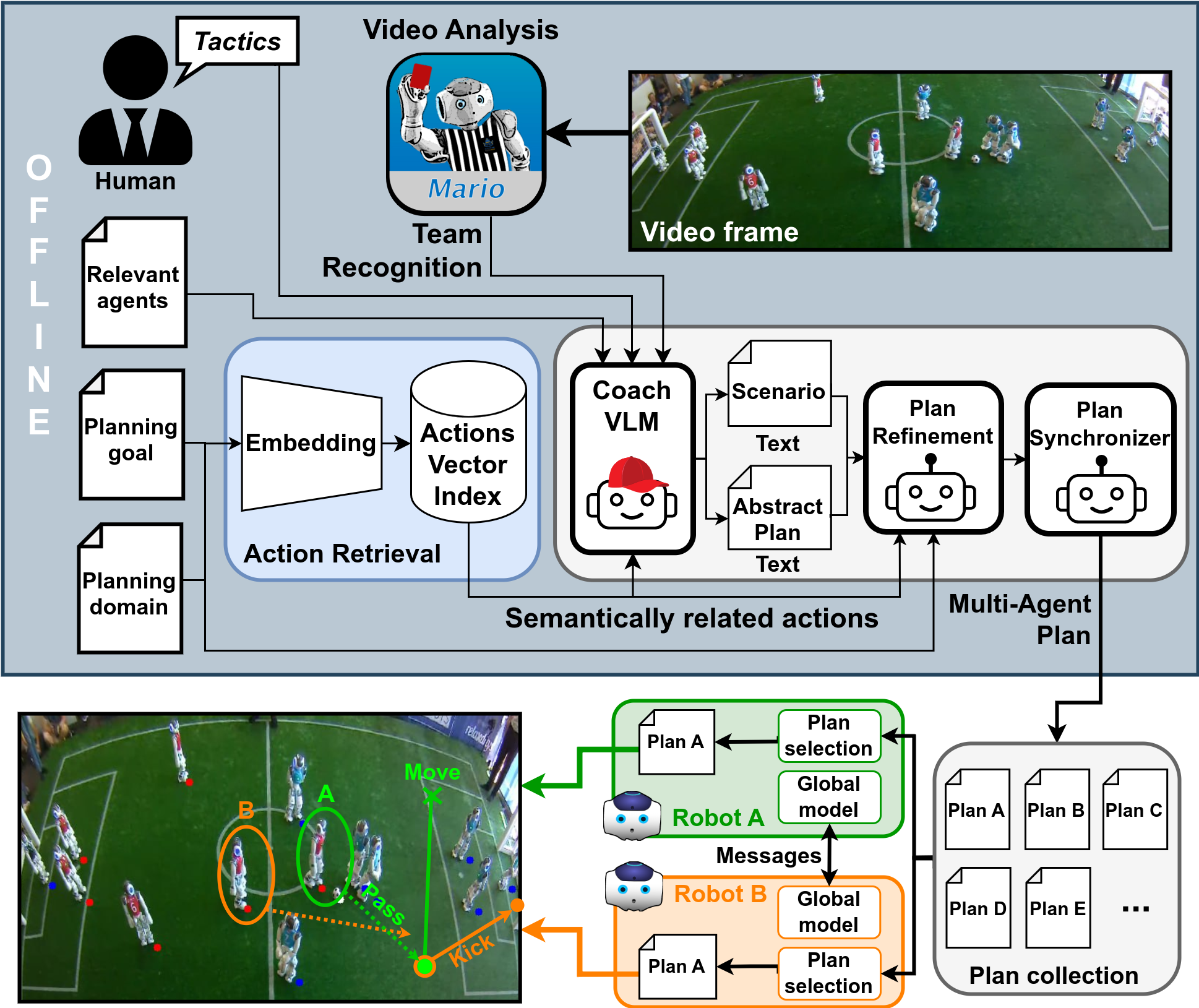
技术框架:LLCoach的技术框架采用多角色LLM方法。首先,将机器人足球队中的不同角色(例如前锋、后卫、守门员)分配给不同的LLM实例。然后,每个LLM实例根据其角色的职责和当前比赛状态,生成相应的行为计划。这些计划经过协调和优化后,形成整个团队的整体策略。该框架包含以下主要模块:角色分配模块、LLM策略生成模块、策略协调与优化模块。
关键创新:该论文的关键创新在于将多角色LLM应用于机器人足球策略生成。与传统的基于规则或有限状态机的策略生成方法相比,LLCoach能够利用LLM的自然语言理解和生成能力,生成更复杂、更灵活的策略。此外,多角色LLM的设计使得每个机器人都能根据自身角色和环境信息生成个性化的策略,从而提高团队的整体协作效率。
关键设计:论文的关键设计包括:1) 使用特定的prompt工程来指导LLM生成符合机器人足球规则和策略要求的行为计划;2) 设计了策略协调与优化算法,以确保不同角色之间的行为计划能够协同工作,避免冲突;3) 采用模拟环境进行策略评估和优化,通过大量的模拟比赛来提高LLM生成的策略的性能。
🖼️ 关键图片


📊 实验亮点
实验结果表明,LLCoach生成的策略在模拟比赛中表现良好,能够有效地对抗人工设计的策略。具体而言,在与人工策略的对抗中,LLCoach控制的机器人足球队在多个指标上都取得了显著的优势,例如进球数、控球率等。这些结果验证了LLM在机器人足球策略生成方面的潜力,并为未来的研究提供了有价值的参考。
🎯 应用场景
该研究成果可应用于其他需要自主规划和决策的机器人应用场景,例如:无人驾驶、智能制造、服务机器人等。通过利用LLM的强大能力,可以使机器人在复杂、动态的环境中更好地完成任务,提高其自主性和智能化水平。此外,该研究还可以促进人机协作领域的发展,使人类能够更有效地与机器人进行交互和合作。
📄 摘要(原文)
The deployment of robots into human scenarios necessitates advanced planning strategies, particularly when we ask robots to operate in dynamic, unstructured environments. RoboCup offers the chance to deploy robots in one of those scenarios, a human-shaped game represented by a soccer match. In such scenarios, robots must operate using predefined behaviors that can fail in unpredictable conditions. This paper introduces a novel application of Large Language Models (LLMs) to address the challenge of generating actionable plans in such settings, specifically within the context of the RoboCup Standard Platform League (SPL) competitions where robots are required to autonomously execute soccer strategies that emerge from the interactions of individual agents. In particular, we propose a multi-role approach leveraging the capabilities of LLMs to generate and refine plans for a robotic soccer team. The potential of the proposed method is demonstrated through an experimental evaluation,carried out simulating multiple matches where robots with AI-generated plans play against robots running human-built code.