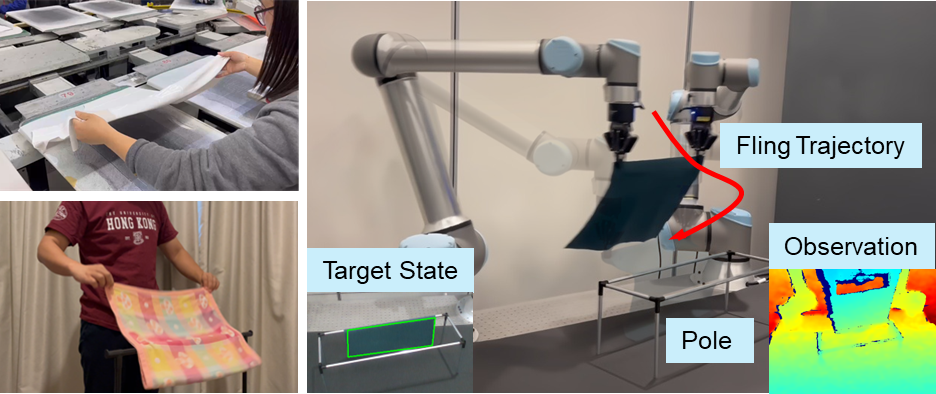
One Fling to Goal: Environment-aware Dynamics for Goal-conditioned Fabric Flinging
作者: Linhan Yang, Lei Yang, Haoran Sun, Zeqing Zhang, Haibin He, Fang Wan, Chaoyang Song, Jia Pan
分类: cs.RO
发布日期: 2024-06-20
💡 一句话要点
提出环境感知动力学模型,实现目标导向的单次抛掷式织物操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 织物操作 动力学建模 图神经网络 环境感知 目标导向控制
📋 核心要点
- 动态织物操作面临织物属性多样、环境交互复杂以及满足目标条件等挑战。
- 论文提出一种环境感知的图动力学模型,并设计实时控制器,实现单次抛掷式织物操作。
- 实验表明,该方法在复杂场景中误差仅为13.2mm,并能零样本泛化到新场景。
📝 摘要(中文)
本文提出了一种名为“One Fling to Goal”的算法,旨在解决动态操控织物以达到目标状态的难题。该方法能够处理具有不同形状和物理属性的织物,并适应各种场景。核心在于学习一个具备环境感知的基于图的动力学模型。借助该模型,设计了一个实时控制器,能够在一次尝试中实现高速织物操作,完成目标导向的任务所需时间少于3秒。实验结果表明,该方法在五个不同的场景中显著改善了目标导向的操作任务,在复杂场景中实现了平均13.2mm的误差。该方法可以无缝迁移到真实世界的机器人系统,并以零样本的方式泛化到未见过的场景。
🔬 方法详解
问题定义:现有方法在动态织物操作中,难以同时处理不同物理属性的织物、复杂环境交互以及精确的目标状态要求。尤其是在高速操作中,对环境的感知和精确的动力学建模是关键痛点。
核心思路:论文的核心在于学习一个环境感知的动力学模型,该模型能够预测织物在特定环境下的运动轨迹。通过图神经网络对织物进行建模,并结合环境信息,从而实现对织物运动的精确预测和控制。这样设计的目的是为了克服传统方法对织物属性和环境依赖性强的缺点。
技术框架:整体流程包括:1)使用图神经网络对织物进行建模,节点表示织物上的关键点,边表示点之间的连接关系;2)引入环境感知模块,提取环境特征并将其融入到图神经网络中;3)训练动力学模型,预测织物在给定动作下的状态变化;4)设计实时控制器,根据动力学模型计算最优动作,实现目标导向的织物操作。
关键创新:最重要的创新点在于环境感知的图动力学模型。该模型能够将环境信息融入到织物动力学预测中,从而提高预测的准确性和鲁棒性。与传统方法相比,该方法能够更好地处理复杂环境下的织物操作任务。
关键设计:图神经网络采用消息传递机制,每个节点根据其邻居节点的状态和环境信息更新自身状态。损失函数包括状态预测误差和目标状态误差,用于优化动力学模型。实时控制器采用模型预测控制(MPC)方法,根据动力学模型预测未来状态,并选择最优动作。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在五个不同的场景中显著改善了目标导向的操作任务,在复杂场景中实现了平均13.2mm的误差。与现有方法相比,该方法在操作速度和精度方面均有显著提升。此外,该方法还能够以零样本的方式泛化到未见过的场景,表明其具有良好的泛化能力。
🎯 应用场景
该研究成果可应用于服装制造、纺织品加工、医疗器械生产等领域,实现自动化、高效率的织物操作。例如,在服装制造中,可以利用该方法自动完成衣物的折叠、铺展等任务,提高生产效率。在医疗器械生产中,可以用于精确操作手术缝合线等柔性材料,提高手术精度和安全性。该研究的未来影响在于推动柔性材料操作的智能化和自动化。
📄 摘要(原文)
Fabric manipulation dynamically is commonly seen in manufacturing and domestic settings. While dynamically manipulating a fabric piece to reach a target state is highly efficient, this task presents considerable challenges due to the varying properties of different fabrics, complex dynamics when interacting with environments, and meeting required goal conditions. To address these challenges, we present \textit{One Fling to Goal}, an algorithm capable of handling fabric pieces with diverse shapes and physical properties across various scenarios. Our method learns a graph-based dynamics model equipped with environmental awareness. With this dynamics model, we devise a real-time controller to enable high-speed fabric manipulation in one attempt, requiring less than 3 seconds to finish the goal-conditioned task. We experimentally validate our method on a goal-conditioned manipulation task in five diverse scenarios. Our method significantly improves this goal-conditioned task, achieving an average error of 13.2mm in complex scenarios. Our method can be seamlessly transferred to real-world robotic systems and generalized to unseen scenarios in a zero-shot manner.