Autonomous Robotic Drilling System for Mice Cranial Window Creation
作者: Enduo Zhao, Murilo M. Marinho, Kanako Harada
分类: cs.RO, cs.AI
发布日期: 2024-06-20 (更新: 2025-11-05)
备注: 14 pages, 11 figures, accepted on T-ASE 2025
期刊: IEEE Transactions on Automation Science and Engineering 2025
DOI: 10.1109/TASE.2025.3630482
💡 一句话要点
提出基于图像与力反馈的自主机器人颅骨钻孔系统,用于小鼠颅窗创建
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人手术 颅窗创建 自主控制 图像处理 力反馈
📋 核心要点
- 小鼠颅窗创建手术对精度要求高,且颅骨存在个体差异,传统方法依赖操作者经验。
- 提出一种自主机器人钻孔系统,利用图像和力反馈实时调整轨迹,无需离线规划。
- 实验表明,该系统在死后小鼠颅骨钻孔中达到70%的成功率,平均耗时9.3分钟。
📝 摘要(中文)
生命科学实验操作中的机器人辅助有望带来良好的结果,而无需考虑科学家的技能水平。生命科学中的实验样本具有个体差异性,因此需要复杂的算法来实现成功的自主机器人控制。本文以小鼠颅窗创建为例,该操作需要移除一块8毫米的圆形颅骨,其厚度约为300微米,但小鼠颅骨的形状和厚度因小鼠的品系、性别和年龄而异。本文开发了一种无需离线规划的自主机器人钻孔系统,该系统包含一个轨迹规划器,该规划器具有执行时反馈,并基于图像和力信息进行钻孔完成度识别。在实验中,我们首先通过将基于图像和力的钻孔完成度识别与其他最先进的深度学习图像处理方法进行比较来评估其性能,并在蛋壳钻孔中进行消融研究,以评估每个模块对系统性能的影响。最后,该系统在死后小鼠中进一步评估了性能,成功率达到70%(20次试验中的14次),平均钻孔时间为9.3分钟。
🔬 方法详解
问题定义:小鼠颅窗创建手术需要精确移除特定大小和厚度的颅骨,但由于小鼠个体差异(品系、性别、年龄),颅骨的形状和厚度存在显著变化。传统的手术方法依赖于操作者的经验和技能,难以保证一致性和精度,并且可能耗时较长。现有方法缺乏对颅骨个体差异的适应性,需要离线规划,难以应对实际操作中的不确定性。
核心思路:本文的核心思路是开发一个自主机器人系统,该系统能够根据实时图像和力反馈信息,动态调整钻孔轨迹,从而适应不同小鼠的颅骨差异。通过图像识别和力传感器数据,系统可以判断钻孔的完成程度,并及时停止钻孔,避免损伤脑组织。这种实时反馈控制策略无需预先进行离线规划,能够更好地应对实际操作中的不确定性。
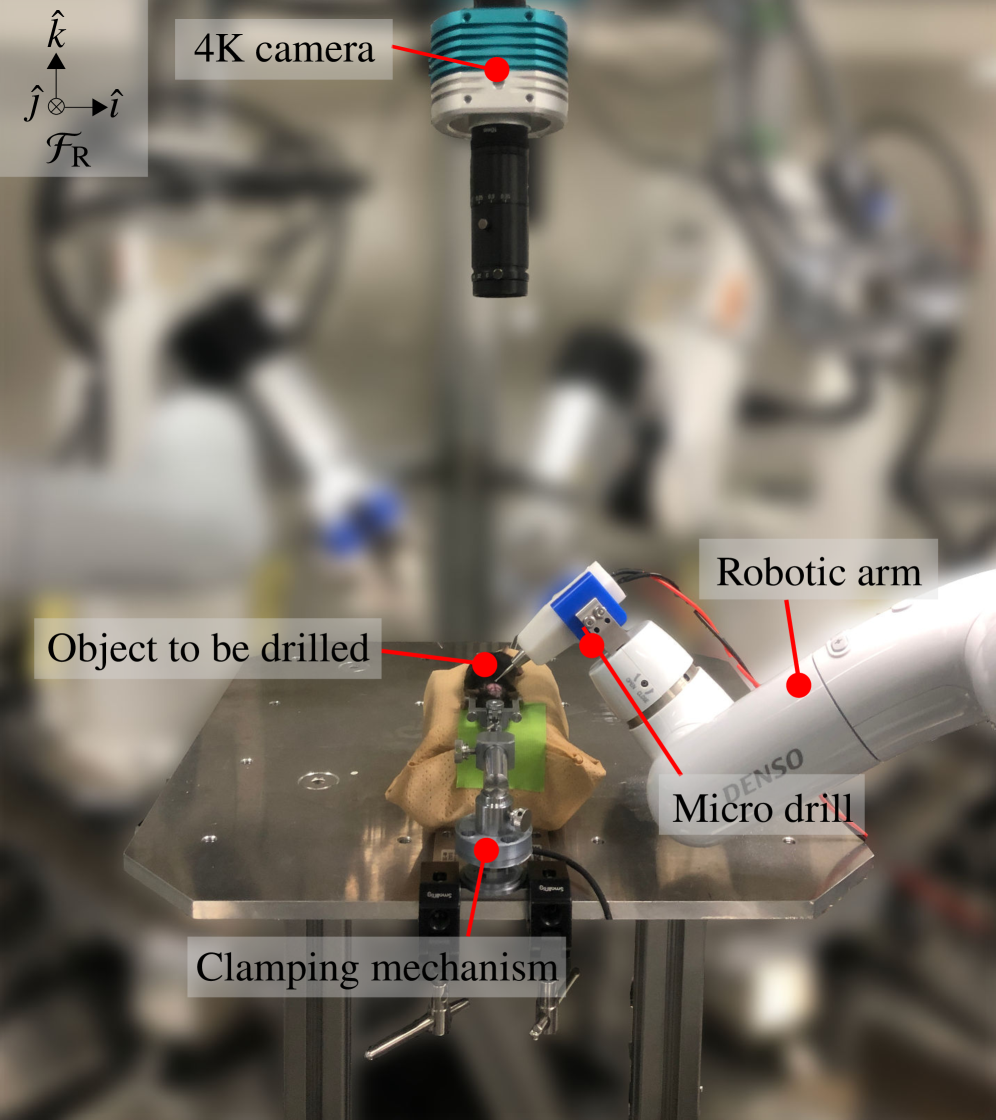
技术框架:该自主机器人钻孔系统主要包含以下几个模块:1) 机器人操作臂:负责执行钻孔操作;2) 钻孔工具:用于移除颅骨;3) 图像传感器:用于获取钻孔区域的图像信息;4) 力传感器:用于测量钻孔过程中的力;5) 轨迹规划器:根据图像和力反馈信息,实时生成钻孔轨迹;6) 钻孔完成度识别模块:基于图像和力信息,判断钻孔是否完成。整个流程是:图像传感器和力传感器实时采集数据 -> 钻孔完成度识别模块判断钻孔状态 -> 轨迹规划器根据钻孔状态调整轨迹 -> 机器人操作臂执行钻孔操作 -> 循环上述步骤,直到钻孔完成。
关键创新:该论文的关键创新在于:1) 提出了一种基于图像和力反馈的钻孔完成度识别方法,能够准确判断钻孔状态;2) 开发了一种实时轨迹规划器,能够根据钻孔状态动态调整轨迹,无需离线规划;3) 将上述两个模块集成到一个自主机器人系统中,实现了小鼠颅窗创建的自动化。
关键设计:钻孔完成度识别模块使用了深度学习方法,具体网络结构未知,但使用了图像和力信息作为输入。轨迹规划器根据钻孔完成度识别模块的输出,调整钻孔速度和深度。力传感器的阈值设置需要根据具体实验条件进行调整。论文中提到进行了消融实验,评估了每个模块对系统性能的影响,但没有具体说明参数设置。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该自主机器人钻孔系统在死后小鼠颅骨钻孔中取得了70%的成功率(20次试验中的14次),平均钻孔时间为9.3分钟。通过与最先进的深度学习图像处理方法进行比较,验证了基于图像和力的钻孔完成度识别方法的有效性。消融研究表明,图像和力反馈模块对系统性能均有重要影响。
🎯 应用场景
该研究成果可应用于生命科学领域,特别是神经科学研究中的小鼠颅窗创建手术。该系统能够提高手术的精度和效率,降低对操作者经验的依赖,并有望减少手术并发症。此外,该技术还可以推广到其他需要精确操作的微创手术中,例如药物递送、细胞移植等,具有广阔的应用前景。
📄 摘要(原文)
Robotic assistance for experimental manipulation in the life sciences is expected to enable favorable outcomes, regardless of the skill of the scientist. Experimental specimens in the life sciences are subject to individual variability and hence require intricate algorithms for successful autonomous robotic control. As a use case, we are studying the cranial window creation in mice. This operation requires the removal of an 8-mm circular patch of the skull, which is approximately 300 um thick, but the shape and thickness of the mouse skull significantly varies depending on the strain of the mouse, sex, and age. In this work, we develop an autonomous robotic drilling system with no offline planning, consisting of a trajectory planner with execution-time feedback with drilling completion level recognition based on image and force information. In the experiments, we first evaluate the image-and-force-based drilling completion level recognition by comparing it with other state-of-the-art deep learning image processing methods and conduct an ablation study in eggshell drilling to evaluate the impact of each module on system performance. Finally, the system performance is further evaluated in postmortem mice, achieving a success rate of 70% (14/20 trials) with an average drilling time of 9.3 min.