An eight-neuron network for quadruped locomotion with hip-knee joint control
作者: Yide Liu, Xiyan Liu, Dongqi Wang, Wei Yang, shaoxing Qu
分类: cs.RO
发布日期: 2024-06-19
💡 一句话要点
提出基于对称理论的八神经元网络,实现四足机器人髋膝关节协调控制和多种步态切换。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 步态生成 中枢模式发生器 对称理论 神经元网络
📋 核心要点
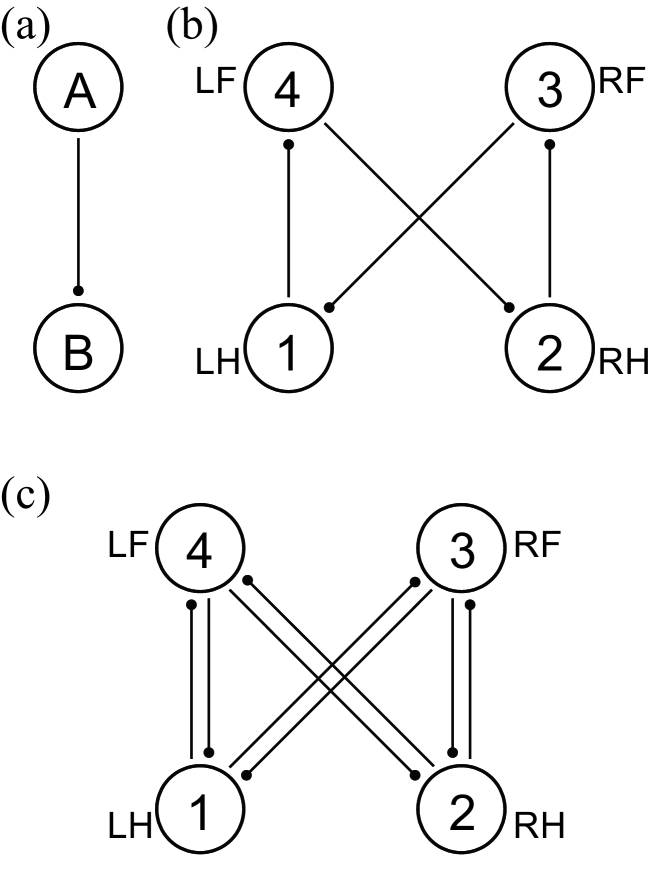
- 现有四足机器人CPG网络设计简单,忽略对称性,步态种类少,且通常仅控制腿部相位,缺乏关节协调。
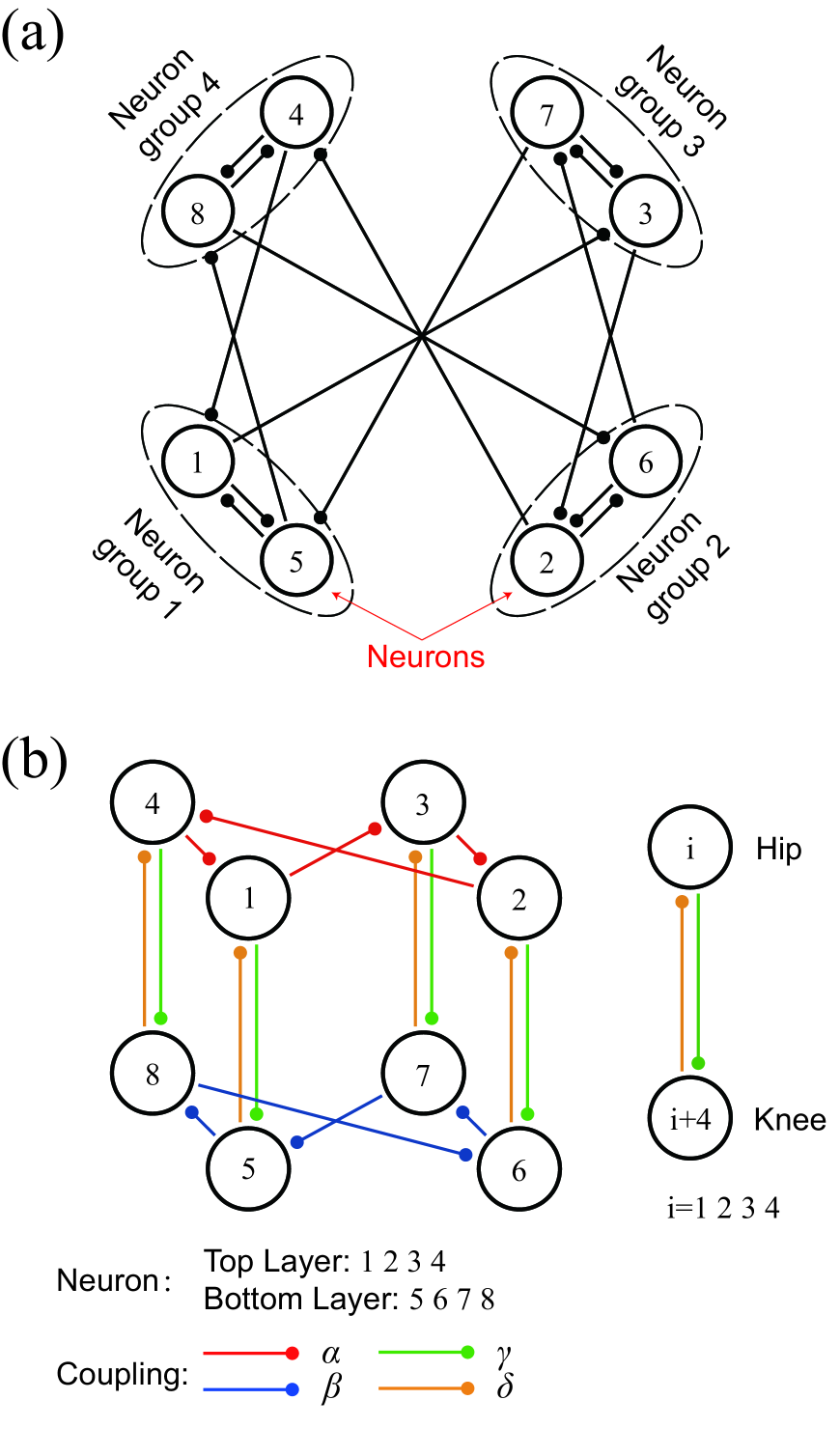
- 论文利用对称理论设计八神经元网络,每个神经元控制髋膝关节,实现多种步态和关节协调。
- 通过数值模拟验证网络信号稳定性,并基于此开发神经元刺激的步态转换策略,并在商用机器人上验证可行性。
📝 摘要(中文)
步态生成器是四足机器人运动控制框架中的关键组件,它能够产生协调多个关节的节律信号。中枢模式发生器(CPG)是步态生成器的生物学对应物,它是由相互作用的神经元组成的小型神经网络。受此启发,研究人员设计了由模拟神经元或振荡器方程组成的人工神经网络。尽管这些设计的CPG已广泛应用于各种机器人运动控制中,但仍存在一些问题,包括:(1)简单的网络设计通常忽略信号和网络结构之间的对称性,导致步态模式少于自然界中发现的步态模式。(2)由于架构考虑不足,四足控制CPG通常仅由四个神经元组成,这限制了网络对腿部相位而非关节协调的直接控制。(3)步态变化是通过改变神经元耦合或神经元与腿之间的分配来实现的,而不是通过外部刺激。我们应用对称理论设计了一个由八个Stein神经元模型组成的网络,该网络能够实现五种步态以及髋膝关节的协调控制。我们通过数值模拟验证了该网络作为步态生成器的信号稳定性,数值模拟揭示了使用神经元刺激进行步态转换期间遇到的各种结果和模式。基于这些发现,我们开发了几种通过神经元刺激实现的成功步态转换策略。通过使用商用四足机器人模型,我们展示了该网络的可用性和可行性,实现了运动控制和步态转换。
🔬 方法详解
问题定义:现有四足机器人步态生成器(CPG)存在以下问题:一是网络设计过于简化,忽略了信号与网络结构之间的对称性,导致步态模式单一;二是通常只使用四个神经元,只能控制腿部相位,无法直接控制关节协调;三是步态切换主要依赖改变神经元耦合或分配,缺乏外部刺激的灵活性。这些限制了四足机器人的运动能力和适应性。
核心思路:论文的核心思路是利用对称理论设计一个具有更多神经元的CPG网络,从而实现更丰富的步态模式和更精细的关节控制。通过增加神经元数量和优化网络结构,使每个神经元能够直接控制髋膝关节,实现关节协调。同时,通过外部神经元刺激实现灵活的步态切换。
技术框架:该方法主要包含以下几个阶段:1. 基于对称理论设计八神经元网络结构,每个神经元对应一个髋膝关节。2. 使用Stein神经元模型模拟神经元行为。3. 通过数值模拟验证网络的信号稳定性和步态生成能力。4. 设计基于神经元刺激的步态转换策略。5. 在商用四足机器人模型上进行实验验证,实现运动控制和步态转换。
关键创新:该论文的关键创新在于:1. 应用对称理论设计CPG网络,保证了网络结构的合理性和步态模式的多样性。2. 增加神经元数量,实现对髋膝关节的直接控制,从而实现关节协调。3. 提出基于神经元刺激的步态转换方法,提高了步态切换的灵活性和可控性。
关键设计:该论文的关键设计包括:1. 八神经元网络结构的设计,保证了网络结构的对称性和信号的稳定性。2. Stein神经元模型的参数设置,影响神经元的放电频率和相位关系。3. 神经元刺激策略的设计,决定了步态转换的方式和效果。具体的参数设置和刺激策略需要根据具体的机器人模型和步态需求进行调整。
🖼️ 关键图片

📊 实验亮点
论文通过数值模拟验证了八神经元网络的信号稳定性,并成功实现了五种步态的生成和切换。在商用四足机器人模型上的实验结果表明,该网络能够有效地控制机器人的运动,并实现平滑的步态转换。具体的性能数据(如步态切换时间、运动精度等)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于各种四足机器人,例如搜救机器人、巡检机器人、物流机器人等。通过实现更丰富和灵活的步态控制,可以提高机器人在复杂地形下的运动能力和适应性,使其能够更好地完成各种任务。此外,该研究也为生物启发式机器人控制提供了新的思路。
📄 摘要(原文)
The gait generator, which is capable of producing rhythmic signals for coordinating multiple joints, is an essential component in the quadruped robot locomotion control framework. The biological counterpart of the gait generator is the Central Pattern Generator (abbreviated as CPG), a small neural network consisting of interacting neurons. Inspired by this architecture, researchers have designed artificial neural networks composed of simulated neurons or oscillator equations. Despite the widespread application of these designed CPGs in various robot locomotion controls, some issues remain unaddressed, including: (1) Simplistic network designs often overlook the symmetry between signal and network structure, resulting in fewer gait patterns than those found in nature. (2) Due to minimal architectural consideration, quadruped control CPGs typically consist of only four neurons, which restricts the network's direct control to leg phases rather than joint coordination. (3) Gait changes are achieved by varying the neuron couplings or the assignment between neurons and legs, rather than through external stimulation. We apply symmetry theory to design an eight-neuron network, composed of Stein neuronal models, capable of achieving five gaits and coordinated control of the hip-knee joints. We validate the signal stability of this network as a gait generator through numerical simulations, which reveal various results and patterns encountered during gait transitions using neuronal stimulation. Based on these findings, we have developed several successful gait transition strategies through neuronal stimulations. Using a commercial quadruped robot model, we demonstrate the usability and feasibility of this network by implementing motion control and gait transitions.