Fast Global Localization on Neural Radiance Field
作者: Mangyu Kong, Seongwon Lee, Jaewon Lee, Euntai Kim
分类: cs.RO
发布日期: 2024-06-18 (更新: 2025-03-14)
备注: Accepted at ICRA 2025
💡 一句话要点
Fast Loc-NeRF:提出一种高效的神经辐射场全局定位方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 神经辐射场 全局定位 蒙特卡洛定位 多分辨率匹配 粒子滤波
📋 核心要点
- 现有Loc-NeRF方法在NeRF地图中进行全局定位时,光线渲染过程耗时,限制了实际应用。
- Fast Loc-NeRF采用由粗到精的多分辨率匹配策略,加速粒子更新过程,提高定位效率。
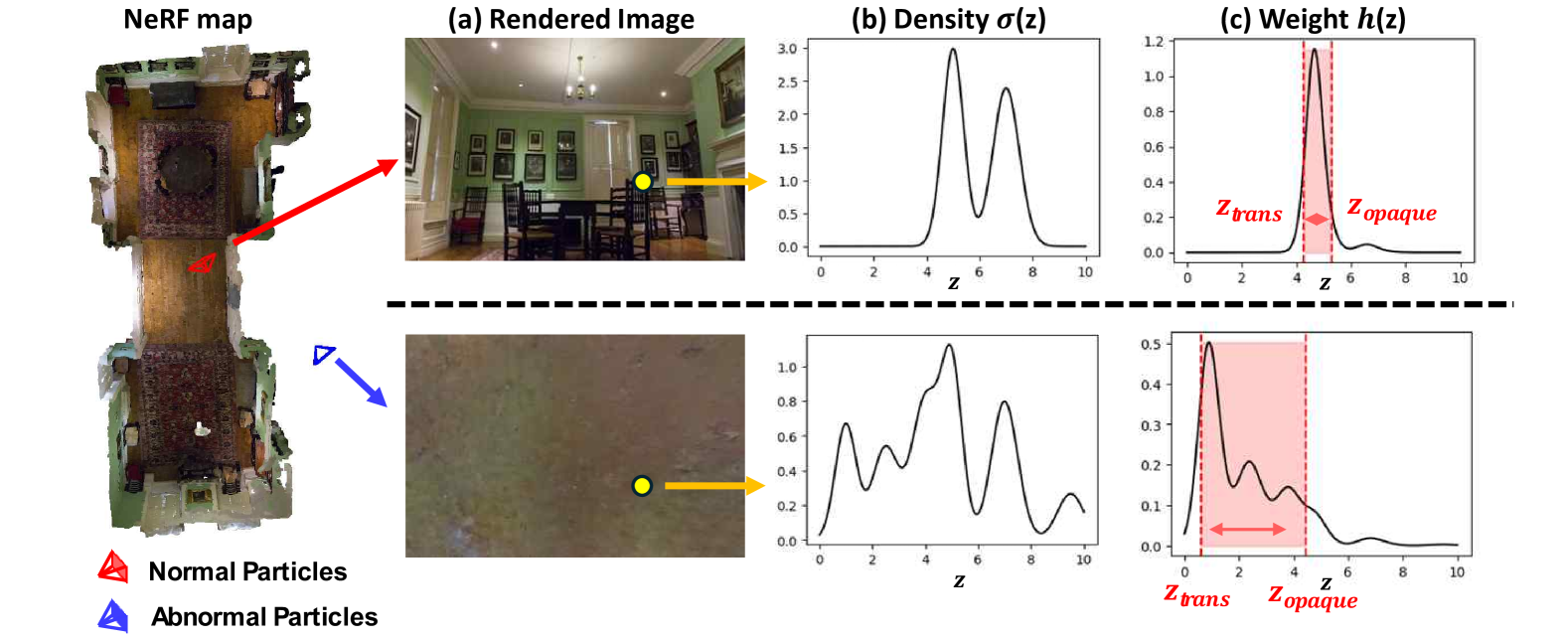
- 提出粒子拒绝加权方法,利用NeRF特性估计粒子不确定性,从而拒绝异常粒子,提升定位精度。
📝 摘要(中文)
神经辐射场(NeRF)为场景表示提供了一种新颖的方式,能够从2D图像中实现高质量的3D重建。基于NeRF的显著成就,在NeRF地图中进行全局定位对于实现广泛的应用至关重要。最近,Loc-NeRF展示了一种将传统蒙特卡洛定位与NeRF相结合的定位方法,显示了使用NeRF作为环境地图的潜力。然而,尽管取得了进展,Loc-NeRF面临着耗时的光线渲染过程的挑战,这在实际应用中可能是一个显著的限制。为了解决这个问题,我们引入了Fast Loc-NeRF,它利用由粗到精的方法来实现更高效和准确的基于NeRF地图的全局定位。具体来说,Fast Loc-NeRF在从低到高的多分辨率上匹配渲染的像素和观察到的图像。因此,它加速了代价高昂的粒子更新过程,同时保持了精确定位结果。此外,为了拒绝异常粒子,我们提出了一种粒子拒绝加权方法,该方法通过利用NeRF的特性来估计粒子的不确定性,并在粒子加权过程中考虑它们。我们的Fast Loc-NeRF在多个基准测试中设置了最先进的定位性能,令人信服地证明了其准确性和效率。
🔬 方法详解
问题定义:论文旨在解决基于NeRF的全局定位中,光线渲染计算量大,导致定位速度慢的问题。现有方法如Loc-NeRF虽然利用NeRF作为环境地图进行定位,但其光线渲染过程耗时,严重限制了其在实际场景中的应用。
核心思路:论文的核心思路是采用由粗到精的多分辨率匹配策略,降低每次迭代的计算量,从而加速粒子更新过程。同时,通过引入粒子拒绝加权,利用NeRF的特性来估计粒子的不确定性,从而拒绝异常粒子,提高定位精度。这样可以在保证定位精度的前提下,显著提高定位速度。
技术框架:Fast Loc-NeRF的整体框架可以概括为以下几个阶段:1. 初始化粒子集合;2. 在多分辨率图像上进行由粗到精的渲染和匹配;3. 根据匹配结果更新粒子权重;4. 使用粒子拒绝加权方法拒绝异常粒子;5. 重采样粒子集合;6. 重复步骤2-5,直到收敛或达到最大迭代次数。
关键创新:论文的关键创新点在于两个方面:一是多分辨率匹配策略,通过在低分辨率图像上快速筛选掉不靠谱的粒子,减少了在高分辨率图像上的计算量;二是粒子拒绝加权方法,该方法利用NeRF的特性,例如渲染结果的不确定性,来估计粒子的可靠性,从而拒绝异常粒子,提高定位精度。与现有方法相比,Fast Loc-NeRF在保证定位精度的前提下,显著提高了定位速度。
关键设计:在多分辨率匹配中,论文采用了一系列分辨率逐渐增高的图像。在每个分辨率下,通过比较渲染图像和观测图像之间的差异来更新粒子权重。粒子拒绝加权方法通过计算每个粒子的渲染结果的不确定性,并将其作为权重的一部分,从而降低了不确定性高的粒子的权重。具体的损失函数和网络结构细节未在摘要中提及,属于未知信息。
🖼️ 关键图片


📊 实验亮点
Fast Loc-NeRF在多个基准测试中取得了最先进的定位性能,证明了其准确性和效率。虽然摘要中没有给出具体的性能数据和对比基线,但可以推断出Fast Loc-NeRF在定位速度和精度上都优于现有的Loc-NeRF方法。具体的提升幅度需要参考论文的实验部分。
🎯 应用场景
该研究成果可广泛应用于机器人导航、自动驾驶、增强现实等领域。通过利用NeRF构建高精度环境地图,并结合快速全局定位技术,可以使机器人在复杂环境中实现自主导航和定位,提高系统的鲁棒性和可靠性。此外,该技术还可以应用于AR/VR场景中,实现更精确的虚拟物体与真实环境的融合。
📄 摘要(原文)
Neural Radiance Fields (NeRF) presented a novel way to represent scenes, allowing for high-quality 3D reconstruction from 2D images. Following its remarkable achievements, global localization within NeRF maps is an essential task for enabling a wide range of applications. Recently, Loc-NeRF demonstrated a localization approach that combines traditional Monte Carlo Localization with NeRF, showing promising results for using NeRF as an environment map. However, despite its advancements, Loc-NeRF encounters the challenge of a time-intensive ray rendering process, which can be a significant limitation in practical applications. To address this issue, we introduce Fast Loc-NeRF, which leverages a coarse-to-fine approach to enable more efficient and accurate NeRF map-based global localization. Specifically, Fast Loc-NeRF matches rendered pixels and observed images on a multi-resolution from low to high resolution. As a result, it speeds up the costly particle update process while maintaining precise localization results. Additionally, to reject the abnormal particles, we propose particle rejection weighting, which estimates the uncertainty of particles by exploiting NeRF's characteristics and considers them in the particle weighting process. Our Fast Loc-NeRF sets new state-of-the-art localization performances on several benchmarks, convincing its accuracy and efficiency.