RGBlimp-Q: Robotic Gliding Blimp With Moving Mass Control Based on a Bird-Inspired Continuum Arm
作者: Hao Cheng, Feitian Zhang
分类: cs.RO
发布日期: 2024-06-16 (更新: 2025-09-12)
期刊: IEEE Transactions on Robotics, vol. 41, pp. 5097-5116, 2025
💡 一句话要点
RGBlimp-Q:基于鸟类仿生连续臂的移动质量控制滑翔机器人飞艇,提升抗扰动能力。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人飞艇 连续臂 移动质量控制 鸟类仿生 姿态控制
📋 核心要点
- 现有飞艇在复杂气流环境中难以保持稳定,限制了其应用范围,尤其是在需要精确控制和交互的场景下。
- RGBlimp-Q通过集成鸟类仿生连续臂,利用内部质量移动实现姿态调节,从而增强了飞艇的抗扰动能力。
- 实验验证了RGBlimp-Q的设计,展示了其在动态环境中稳定飞行和进行空中操作的潜力,为飞艇应用开辟新方向。
📝 摘要(中文)
本文提出了一种名为RGBlimp-Q的机器人滑翔飞艇,它是一种比空气轻的飞行平台,具有更长的运行时间和增强的人机交互安全性。然而,在环境气流扰动下实现稳健的飞行性能仍然是一个关键挑战,限制了其更广泛的部署。受鸟类飞行力学的启发,特别是鸟类在湍流风况下栖息和稳定的能力,RGBlimp-Q配备了一个鸟类仿生连续臂,该连续臂具有一种新型的移动质量驱动机制。该连续臂通过内部质量重新分配实现灵活的姿态调节,显著增强了系统对外部扰动的抵抗能力。此外,它通过使用末端执行器爪与环境交互,类似于鸟类的栖息行为,从而促进空中操作。本文介绍了RGBlimp-Q的设计、建模和原型,并通过全面的实验评估和比较分析提供支持。据作者所知,这代表了连续机构首次跨学科集成到比空气轻的机器人平台中,其中连续臂同时充当驱动和操作模块。这种设计为机器人飞艇建立了一种新的范例,将其适用性扩展到复杂和动态的环境。
🔬 方法详解
问题定义:现有机器人飞艇在复杂和动态环境中,尤其是在受到环境气流扰动时,难以保持稳定的飞行姿态和进行精确的操作。传统的飞艇控制方法往往难以有效应对这些扰动,限制了其在实际场景中的应用,例如空中检测、环境监测和人机协作等。
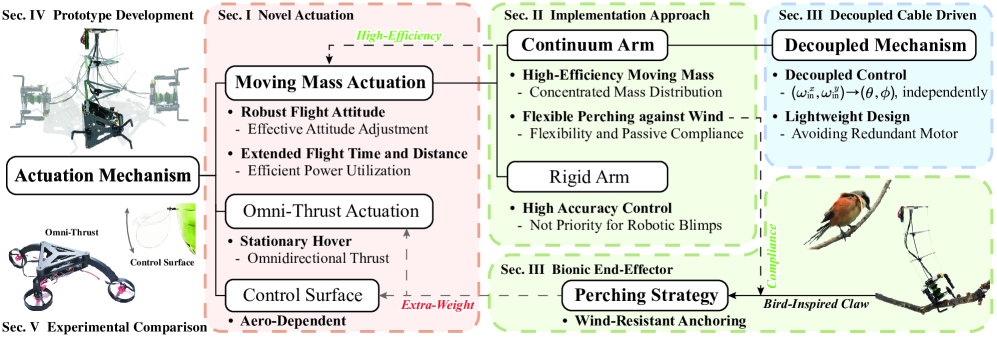
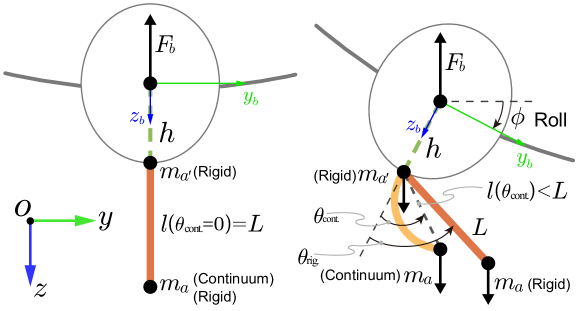
核心思路:RGBlimp-Q的核心思路是借鉴鸟类在飞行中的姿态控制机制,特别是鸟类在湍流环境中通过调整身体姿态来保持平衡的能力。通过在飞艇上集成一个鸟类仿生连续臂,利用内部质量的重新分布来实现对飞艇姿态的精确控制,从而提高其在复杂环境中的稳定性和操作能力。这种设计将驱动和操作模块集成到同一个连续臂中,简化了系统结构。
技术框架:RGBlimp-Q的整体架构包括一个充气囊体提供升力,一个鸟类仿生连续臂用于姿态控制和操作,以及相应的控制系统。连续臂通过移动内部质量来实现姿态调节,末端执行器爪用于与环境进行交互。控制系统负责接收传感器数据,计算控制指令,并驱动连续臂进行运动。整体流程为:传感器感知环境扰动 -> 控制系统计算所需姿态调整 -> 连续臂移动内部质量 -> 飞艇姿态调整 -> 末端执行器进行操作。
关键创新:RGBlimp-Q最重要的技术创新点在于将连续机构集成到比空气轻的机器人平台中,并使该连续臂同时充当驱动和操作模块。这种集成方式不仅简化了系统结构,还提高了系统的灵活性和适应性。此外,该设计借鉴了鸟类飞行力学,通过模仿鸟类的姿态控制机制来提高飞艇的抗扰动能力。
关键设计:连续臂的设计是关键。具体参数未知,但需要考虑以下因素:连续臂的材料选择(需要轻质且具有足够的强度),驱动机构的设计(需要能够精确控制内部质量的移动),以及末端执行器爪的设计(需要能够有效地与环境进行交互)。控制算法的设计也至关重要,需要能够根据传感器数据实时计算出最佳的姿态调整策略。
🖼️ 关键图片

📊 实验亮点
论文通过实验验证了RGBlimp-Q的设计。虽然具体的性能数据未知,但实验结果表明,该飞艇能够在受到外部扰动时保持稳定的飞行姿态,并能够利用末端执行器爪与环境进行交互。与传统的飞艇相比,RGBlimp-Q在抗扰动能力和操作灵活性方面具有显著优势。具体提升幅度未知。
🎯 应用场景
RGBlimp-Q具有广泛的应用前景,例如在室内或室外环境中进行空中检测、环境监测、物流运输和人机协作。其增强的抗扰动能力使其能够在复杂和动态的环境中稳定飞行和操作,从而扩展了飞艇的应用范围。未来,RGBlimp-Q有望在灾害救援、农业监测和基础设施维护等领域发挥重要作用。
📄 摘要(原文)
Robotic blimps, as lighter-than-air aerial platforms, offer extended operational duration and enhanced safety in human-robot interactions due to their buoyant lift. However, achieving robust flight performance under environmental airflow disturbances remains a critical challenge, thereby limiting their broader deployment. Inspired by avian flight mechanics, particularly the ability of birds to perch and stabilize in turbulent wind conditions, this article introduces RGBlimp-Q -- a robotic gliding blimp equipped with a bird-inspired continuum arm featuring a novel moving mass actuation mechanism. This continuum arm enables flexible attitude regulation through internal mass redistribution, significantly enhancing the system's resilience to external disturbances. In addition, it facilitates aerial manipulation by employing end-effector claws that interact with the environment in a manner analogous to avian perching behavior. This article presents the design, modeling, and prototyping of RGBlimp-Q, supported by comprehensive experimental evaluation and comparative analysis. To the best of the authors' knowledge, this represents the first interdisciplinary integration of continuum mechanisms into a lighter-than-air robotic platform, where the continuum arm simultaneously functions as both an actuation and manipulation module. This design establishes a novel paradigm for robotic blimps, expanding their applicability to complex and dynamic environments.