GPT-Fabric: Smoothing and Folding Fabric by Leveraging Pre-Trained Foundation Models
作者: Vedant Raval, Enyu Zhao, Hejia Zhang, Stefanos Nikolaidis, Daniel Seita
分类: cs.RO
发布日期: 2024-06-14 (更新: 2024-10-27)
备注: Code, prompts, videos, and supplementary material are available at https://tinyurl.com/gptfab
💡 一句话要点
GPT-Fabric:利用预训练模型实现织物平整与折叠的机器人操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人操作 织物操作 预训练模型 GPT 零样本学习 强化学习 计算机视觉
📋 核心要点
- 机器人织物操作面临无限维配置空间、复杂动力学和自遮挡等挑战,现有方法依赖特定环境或大量训练数据。
- GPT-Fabric利用预训练模型直接输出抓取和拉动动作,无需特定织物数据集训练,实现零样本操作。
- 实验表明,GPT-Fabric在织物平整方面达到SOTA,折叠方面与现有方法相当,并在真实环境中验证了其有效性。
📝 摘要(中文)
织物操作在折叠毯子、处理病人衣物以及用覆盖物保护物品等方面具有广泛应用。由于织物具有无限维的配置空间、复杂的动力学特性,并且可能处于具有严重自遮挡的折叠或褶皱状态,因此机器人执行织物操作具有挑战性。以往的机器人织物操作工作要么依赖于高度工程化的设置,要么依赖于基于学习的方法,这些方法创建并训练机器人-织物交互数据。在本文中,我们提出了GPT-Fabric,用于织物平整和折叠的典型任务,其中GPT直接输出一个动作,告知机器人抓取和拉动织物的位置。我们进行了大量的模拟实验,以测试GPT-Fabric与先前方法的平整和折叠性能。GPT-Fabric在织物平整方面与最先进水平相匹配,并且在大多数测试的先前织物折叠方法中也取得了相当的性能,即使没有明确地在特定于织物的的数据集上进行训练(即零样本操作)。此外,我们在物理实验中应用了GPT-Fabric,进行了10次平整和12次折叠实验。我们的结果表明,GPT-Fabric是一种有前途的高精度织物操作任务方法。
🔬 方法详解
问题定义:机器人织物操作旨在使机器人能够自动执行织物的平整、折叠等任务。现有方法的痛点在于,要么需要针对特定织物和环境进行精细的工程设计,通用性差;要么依赖于大量的机器人-织物交互数据进行训练,成本高昂且泛化能力有限。特别是对于具有复杂褶皱和自遮挡的织物,现有方法难以有效处理。
核心思路:GPT-Fabric的核心思路是利用预训练的语言模型(GPT)的强大泛化能力,将织物操作任务转化为一个序列决策问题。通过将织物的状态(例如图像)作为输入,GPT直接预测机器人应该执行的抓取和拉动动作。这种方法避免了显式地建模织物的动力学特性,也无需针对特定织物进行训练,从而实现了零样本操作。
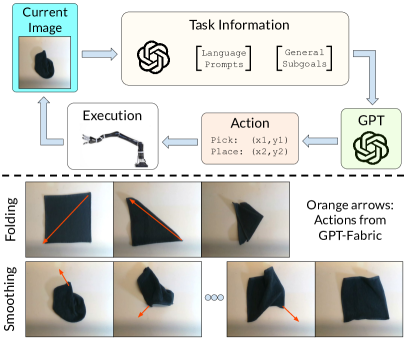
技术框架:GPT-Fabric的整体框架包括以下几个主要模块:1) 织物状态感知模块:使用摄像头或其他传感器获取织物的图像或点云数据。2) GPT动作预测模块:将织物状态作为输入,通过GPT模型预测机器人应该执行的抓取和拉动动作。3) 机器人控制模块:根据GPT模型预测的动作,控制机器人执行相应的操作。4) 状态更新模块:在机器人执行动作后,更新织物的状态,并将其反馈给GPT模型,用于下一步的动作预测。
关键创新:GPT-Fabric最重要的技术创新点在于,它将预训练的语言模型应用于机器人织物操作任务,实现了零样本操作。与现有方法相比,GPT-Fabric无需针对特定织物进行训练,具有更强的泛化能力和适应性。此外,GPT-Fabric直接预测抓取和拉动动作,避免了显式地建模织物的动力学特性,简化了问题的复杂性。
关键设计:GPT-Fabric的关键设计包括:1) 使用预训练的GPT模型作为动作预测器。2) 将织物状态表示为图像或点云数据,并将其作为GPT模型的输入。3) 定义抓取和拉动动作的空间,例如抓取点的位置和拉动的方向和距离。4) 使用强化学习或其他优化算法来微调GPT模型,以提高其在织物操作任务中的性能。具体的损失函数和网络结构细节在论文中可能没有详细描述,需要进一步查阅相关资料。
🖼️ 关键图片

📊 实验亮点
GPT-Fabric在仿真实验中,在织物平整任务上达到了与现有最佳方法相当的性能,并在织物折叠任务上取得了可比的结果,而无需在特定织物数据集上进行训练。在真实机器人实验中,GPT-Fabric成功完成了10次平整和12次折叠任务,验证了其在实际环境中的可行性。这些结果表明,GPT-Fabric是一种有前途的织物操作方法。
🎯 应用场景
GPT-Fabric在多个领域具有广泛的应用前景,例如:1) 智能家居:用于自动整理衣物、折叠被褥等。2) 医疗保健:用于处理病人衣物、铺设床单等。3) 工业制造:用于自动化服装生产、纺织品加工等。4) 物流仓储:用于自动化货物分拣、包装等。该研究有望提高机器人操作的智能化水平,降低人工成本,并改善人们的生活质量。
📄 摘要(原文)
Fabric manipulation has applications in folding blankets, handling patient clothing, and protecting items with covers. It is challenging for robots to perform fabric manipulation since fabrics have infinite-dimensional configuration spaces, complex dynamics, and may be in folded or crumpled configurations with severe self-occlusions. Prior work on robotic fabric manipulation relies either on heavily engineered setups or learning-based approaches that create and train on robot-fabric interaction data. In this paper, we propose GPT-Fabric for the canonical tasks of fabric smoothing and folding, where GPT directly outputs an action informing a robot where to grasp and pull a fabric. We perform extensive experiments in simulation to test GPT-Fabric against prior methods for smoothing and folding. GPT-Fabric matches the state-of-the-art in fabric smoothing, and also achieves comparable performance with most prior fabric folding methods tested, even without explicitly training on a fabric-specific dataset (i.e., zero-shot manipulation). Furthermore, we apply GPT-Fabric in physical experiments over 10 smoothing and 12 folding rollouts. Our results suggest that GPT-Fabric is a promising approach for high-precision fabric manipulation tasks