Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
作者: MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
分类: cs.RO, eess.SY
发布日期: 2024-06-09
💡 一句话要点
提出基于流体动力学的通用自动驾驶车辆运动规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 自动驾驶 运动规划 流体动力学 格子玻尔兹曼方法 轨迹生成 非完整约束 模型预测控制
📋 核心要点
- 现有自动驾驶运动规划方法在处理复杂场景和保证可解释性方面存在局限性,难以满足通用性和安全性的需求。
- 该论文提出了一种基于流体动力学理论的运动规划方法,利用格子玻尔兹曼方法生成时空向量场,指导车辆轨迹生成。
- 仿真结果表明,该方法在高速公路驾驶、匝道汇入和交叉路口穿越等场景中优于传统的模型预测控制方法。
📝 摘要(中文)
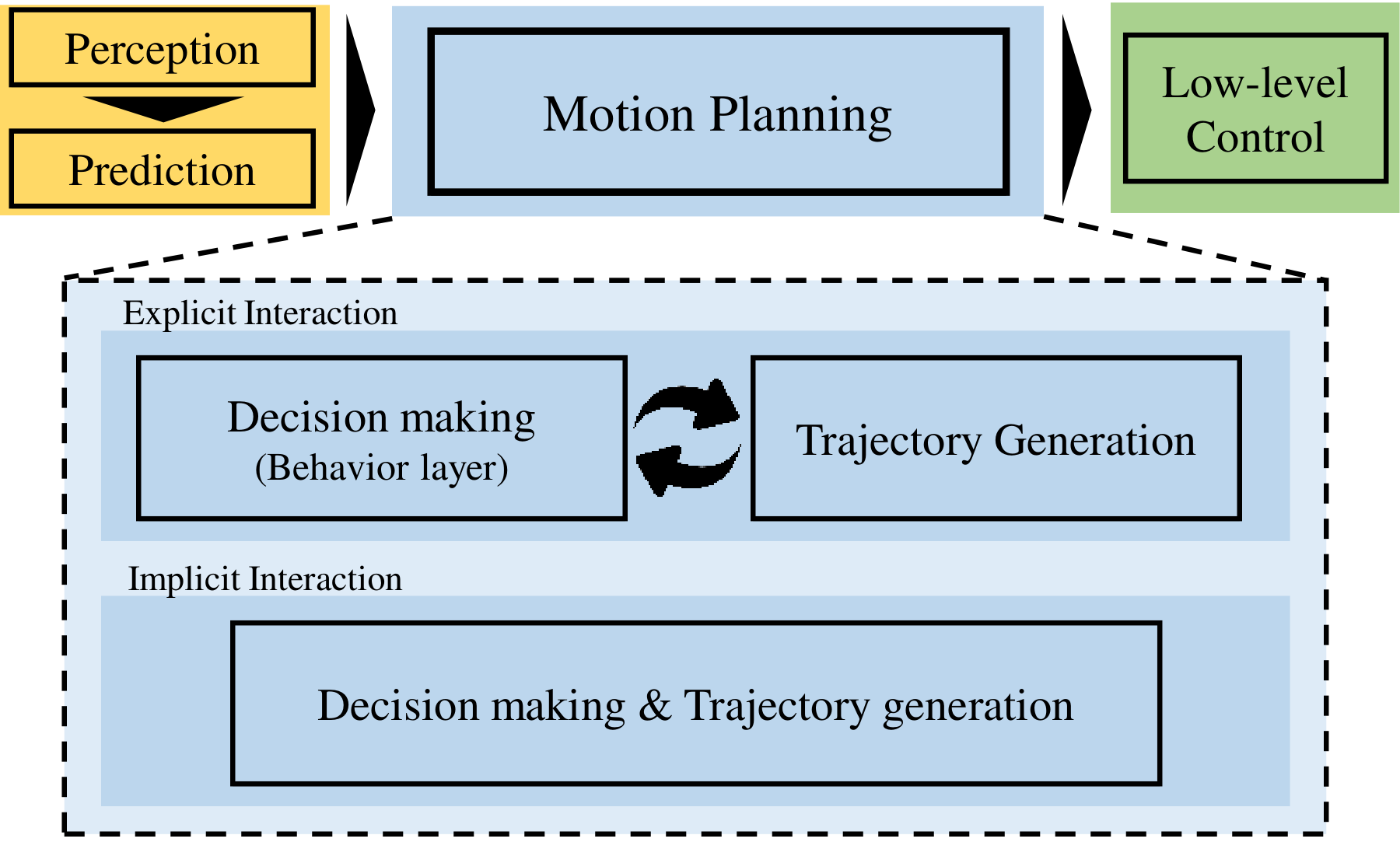
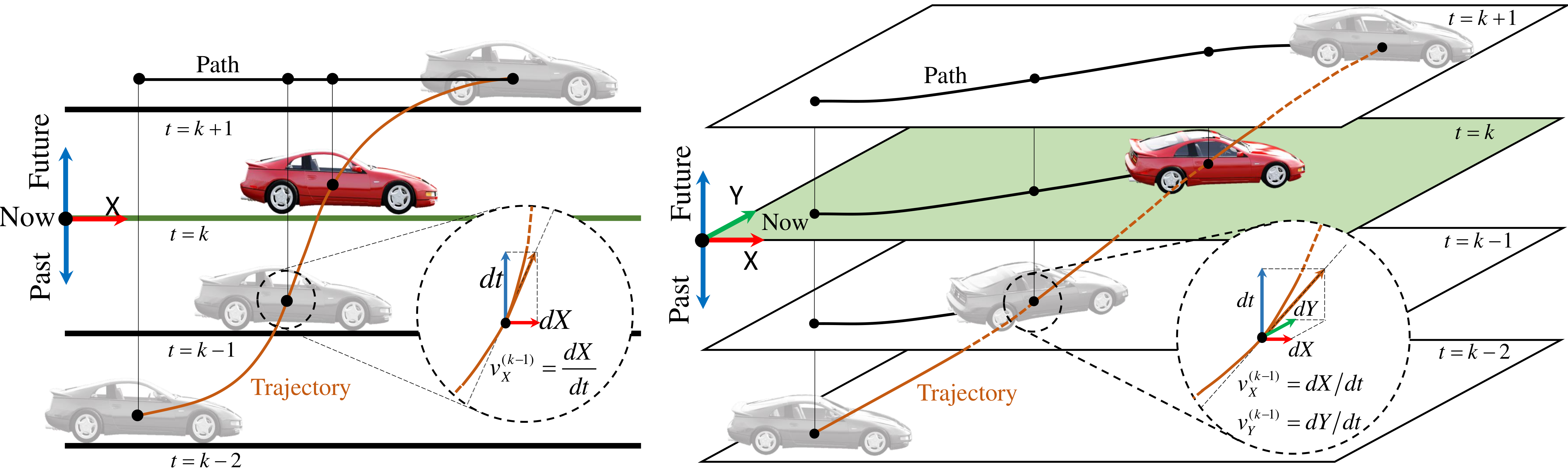
本文提出了一种新颖的通用自动驾驶车辆运动规划解决方案,该方案灵感来源于流体动力学理论。通用运动规划器旨在处理各种自动驾驶功能(ADF)在不同运行设计域(ODD)中的运动规划任务,包括策略决策和轨迹生成。设计通用运动规划器的挑战在于:a)需要处理各种场景以及每个驾驶场景中不同的语义信息;b)需要考虑长期决策和短期轨迹生成之间的强耦合;c)必须考虑车辆动力学的非完整约束;d)运动规划器必须具有足够的计算效率以实现实时运行。现有方法要么局限于特定场景(基于逻辑),要么是数据驱动的(基于学习),因此缺乏可解释性,这对于安全关键的自动驾驶系统(ADS)非常重要。本文采用一种计算高效的技术,即格子玻尔兹曼方法,生成时空向量场,并根据自车(Ego vehicle)的非完整动力学模型,利用该向量场生成可行的候选轨迹。最后,选择优化行驶质量、效率和安全性的轨迹,以计算即将到来的控制信号,即油门/刹车和转向角。通过在高速公路驾驶、匝道汇入和交叉路口穿越场景中的仿真评估,表明所提出的方法优于基于模型预测控制(MPC)的传统运动规划解决方案。
🔬 方法详解
问题定义:自动驾驶车辆的运动规划需要应对各种复杂场景,同时兼顾长期决策和短期轨迹生成,并满足车辆的非完整约束。现有方法要么依赖于特定场景的规则,要么是数据驱动的,缺乏通用性和可解释性,难以保证安全。
核心思路:将车辆的运动规划问题类比于流体中的粒子运动,利用流体动力学理论来指导轨迹生成。通过构建一个时空向量场,引导车辆在满足动力学约束的条件下,安全高效地到达目标。
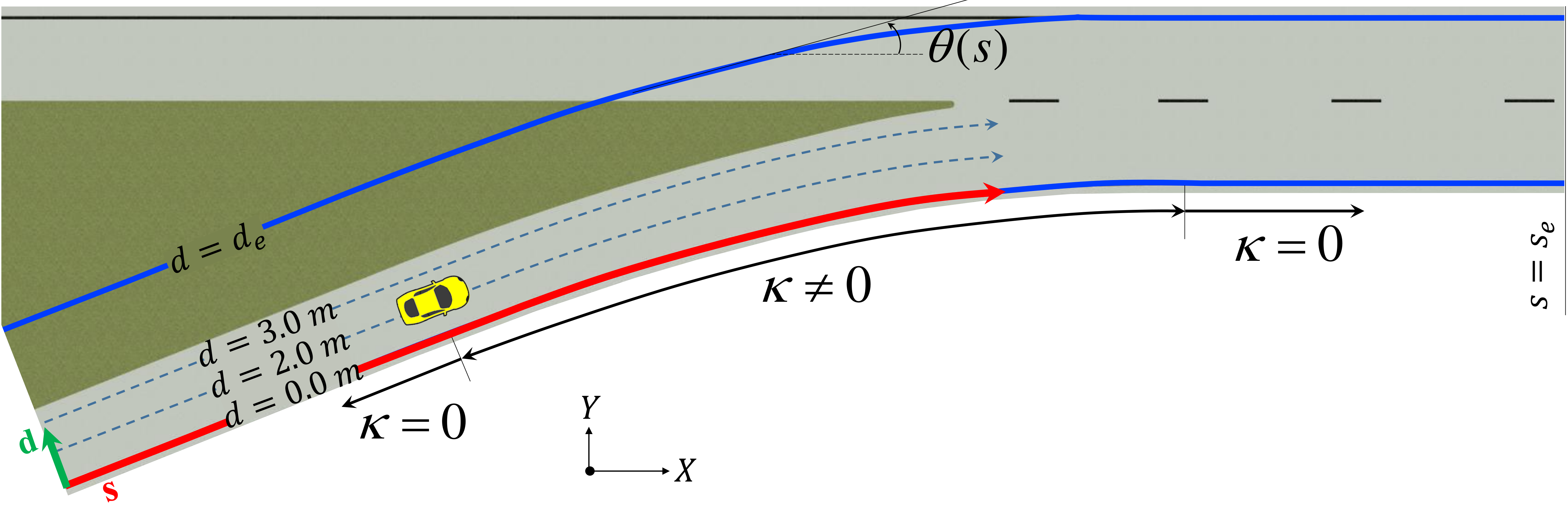
技术框架:该方法主要包含以下几个阶段:1) 利用格子玻尔兹曼方法(LBM)生成时空向量场,该向量场反映了环境的语义信息和交通规则;2) 根据自车(Ego vehicle)的非完整动力学模型,利用该向量场生成可行的候选轨迹;3) 优化候选轨迹,选择在行驶质量、效率和安全性方面表现最佳的轨迹;4) 根据选定的轨迹,计算控制信号,包括油门/刹车和转向角。
关键创新:该方法的核心创新在于将流体动力学理论应用于自动驾驶车辆的运动规划。通过类比流体中的粒子运动,可以有效地处理复杂场景中的运动规划问题,并保证轨迹的可行性和安全性。此外,格子玻尔兹曼方法(LBM)的应用提高了计算效率,使其能够满足实时性要求。
关键设计:格子玻尔兹曼方法(LBM)是该方法中的关键技术。LBM通过模拟流体中粒子的运动和碰撞来求解流体动力学方程。在该方法中,LBM被用于生成时空向量场,该向量场反映了环境的语义信息和交通规则。轨迹优化阶段需要综合考虑行驶质量、效率和安全性,可以通过加权的方式将这些因素纳入优化目标函数中。
🖼️ 关键图片
📊 实验亮点
该方法在高速公路驾驶、匝道汇入和交叉路口穿越等场景中进行了仿真验证,结果表明该方法优于传统的基于模型预测控制(MPC)的运动规划方法。具体性能提升数据未知,但论文强调了在复杂场景下的优越性。
🎯 应用场景
该研究成果可应用于各种自动驾驶场景,例如高速公路自动驾驶、城市道路自动驾驶、自动泊车等。该方法具有通用性和可解释性,有助于提高自动驾驶系统的安全性和可靠性,加速自动驾驶技术的商业化落地。未来,该方法可以进一步扩展到多车协同场景,实现更高级别的自动驾驶功能。
📄 摘要(原文)
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).