RiskMap: A Unified Driving Context Representation for Autonomous Motion Planning in Urban Driving Environment
作者: Ren Xin, Sheng Wang, Yingbing Chen, Jie Cheng, Ming Liu, Jun Ma
分类: cs.RO
发布日期: 2024-06-06 (更新: 2024-10-11)
备注: Accepted on 8th Oct 2024
💡 一句话要点
提出RiskMap:一种用于城市自动驾驶运动规划的统一驾驶环境风险表征方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自动驾驶 运动规划 风险评估 深度学习 环境感知
📋 核心要点
- 现有运动规划方法在复杂城市交通环境中,难以有效融合感知信息、地图数据和行为预测,导致规划效率和安全性受限。
- 本文提出RiskMap,一种基于深度学习的统一风险场表征,将交通参与者的统计认知编码为可微分的驾驶成本先验,简化规划过程。
- 实验结果表明,RiskMap能够提升自动驾驶的安全性和平滑性,为复杂驾驶场景下的运动规划提供了一种有效解决方案。
📝 摘要(中文)
运动规划是一项复杂的任务,需要结合感知、地图信息融合和预测,尤其是在交通拥堵的情况下。开发一种可扩展且高效的表征方法,以可视化传感器噪声并为实时规划任务提供基础是很有价值的。本文旨在开发一种可解释的地图表征,为规划任务提供驾驶成本的先验知识。通过这种方式,我们可以简化处理复杂驾驶场景的规划过程,并可视化传感器噪声。具体来说,我们提出了一种由深度神经网络支持的统一上下文表征。该统一表征是一个可微分的风险场,它是关于交通参与者的统计认知的分析表征,用于下游规划任务。这种表征方法被命名为RiskMap。采用基于采样的规划器来训练和比较RiskMap生成方法。本文探讨了RiskMap生成工具和模型结构,结果表明我们的方法可以提高驾驶安全性和平滑性,并讨论了该方法的局限性。
🔬 方法详解
问题定义:在城市环境中进行自动驾驶运动规划时,需要综合考虑感知信息、地图信息以及其他交通参与者的行为预测。现有的方法通常难以有效地融合这些信息,并且对传感器噪声敏感,导致规划的路径不够安全和平滑。此外,缺乏可解释的驾驶成本先验知识也使得规划过程变得复杂和低效。
核心思路:本文的核心思路是利用深度神经网络学习一个统一的风险场表征(RiskMap),该表征能够将交通参与者的统计认知编码为可微分的驾驶成本先验。通过将复杂的驾驶环境信息压缩到一个易于处理的风险场中,可以简化运动规划过程,并提高规划的安全性和效率。
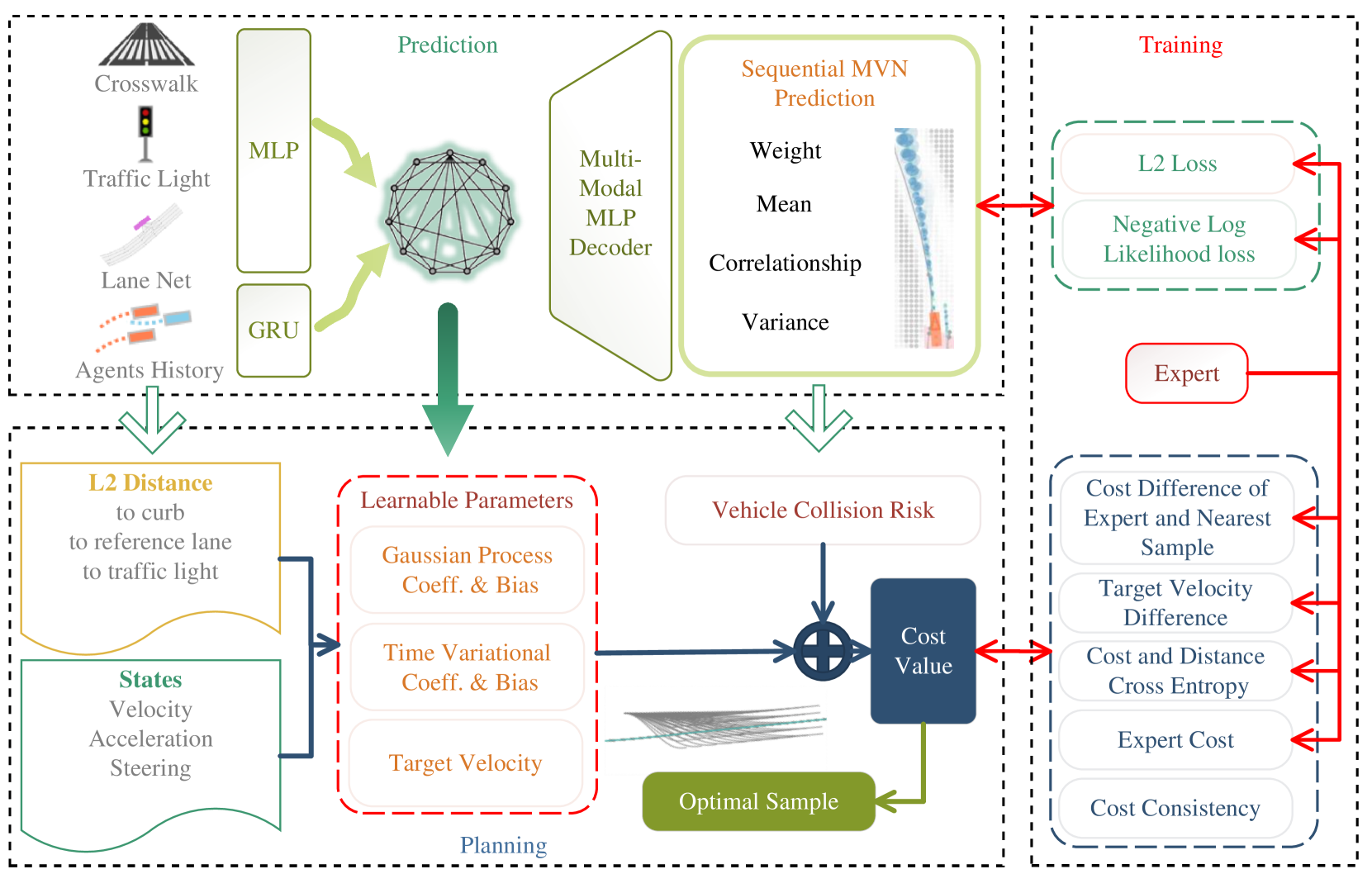
技术框架:RiskMap的生成过程主要包括以下几个阶段:首先,利用传感器数据(如激光雷达、摄像头)和地图信息构建驾驶环境的初始表征。然后,将该表征输入到深度神经网络中,网络学习交通参与者的行为模式和潜在风险,并生成RiskMap。最后,利用基于采样的规划器,根据RiskMap提供的驾驶成本先验,生成安全和平滑的行驶轨迹。
关键创新:RiskMap的关键创新在于它提供了一种统一且可微分的驾驶环境表征。与传统的基于规则或人工设计的驾驶成本函数相比,RiskMap能够自动学习复杂的交通模式和风险,并能够适应不同的驾驶场景。此外,RiskMap的可微分性使得可以利用梯度下降等优化方法来优化运动规划过程。
关键设计:RiskMap的生成网络可以采用多种不同的结构,例如卷积神经网络(CNN)或图神经网络(GNN)。损失函数的设计需要考虑驾驶安全性和平滑性,例如可以采用碰撞惩罚项、偏离车道惩罚项以及加速度惩罚项。此外,还可以通过数据增强等技术来提高RiskMap的泛化能力。
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了RiskMap的有效性。实验结果表明,与传统的运动规划方法相比,RiskMap能够显著提高驾驶安全性和平滑性。具体来说,RiskMap能够减少碰撞次数,降低偏离车道的概率,并生成更加平滑的行驶轨迹。实验结果还表明,RiskMap能够适应不同的驾驶场景,并具有良好的泛化能力。
🎯 应用场景
RiskMap可应用于各种自动驾驶场景,尤其是在复杂的城市交通环境中。它可以帮助自动驾驶车辆更好地理解周围环境,预测其他交通参与者的行为,并规划出安全、高效的行驶路径。此外,RiskMap还可以用于驾驶员辅助系统,例如碰撞预警和车道保持等功能,提高驾驶安全性。
📄 摘要(原文)
Motion planning is a complicated task that requires the combination of perception, map information integration and prediction, particularly when driving in heavy traffic. Developing an extensible and efficient representation that visualizes sensor noise and provides basis to real-time planning tasks is desirable. We aim to develop an interpretable map representation, which offers prior of driving cost in planning tasks. In this way, we can simplify the planning process for dealing with complex driving scenarios and visualize sensor noise. Specifically, we propose a unified context representation empowered by deep neural networks. The unified representation is a differentiable risk field, which is an analytical representation of statistical cognition regarding traffic participants for downstream planning tasks. This representation method is nominated as RiskMap. A sampling-based planner is adopted to train and compare RiskMap generation methods. In this paper, the RiskMap generation tools and model structures are explored, the results illustrate that our method can improve driving safety and smoothness, and the limitation of our method is also discussed.