AdapJ: An Adaptive Extended Jacobian Controller for Soft Manipulators
作者: Zixi Chen, Xuyang Ren, Yuya Hamamatsu, Gastone Ciuti, Donato Romano, Cesare Stefanini
分类: cs.RO
发布日期: 2024-06-06 (更新: 2025-09-18)
备注: 11 pages, 11 figures, 3 tables, accepted by IEEE TMech
DOI: 10.1109/TMECH.2025.3612503
💡 一句话要点
提出AdapJ自适应扩展雅可比控制器,解决软体机器人控制的非线性与滞后问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人控制 雅可比控制器 自适应控制 逆模型 非线性控制
📋 核心要点
- 软体机器人控制面临非线性与滞后性挑战,传统雅可比控制器难以精确建模,神经网络方法则需要大量数据且泛化性不足。
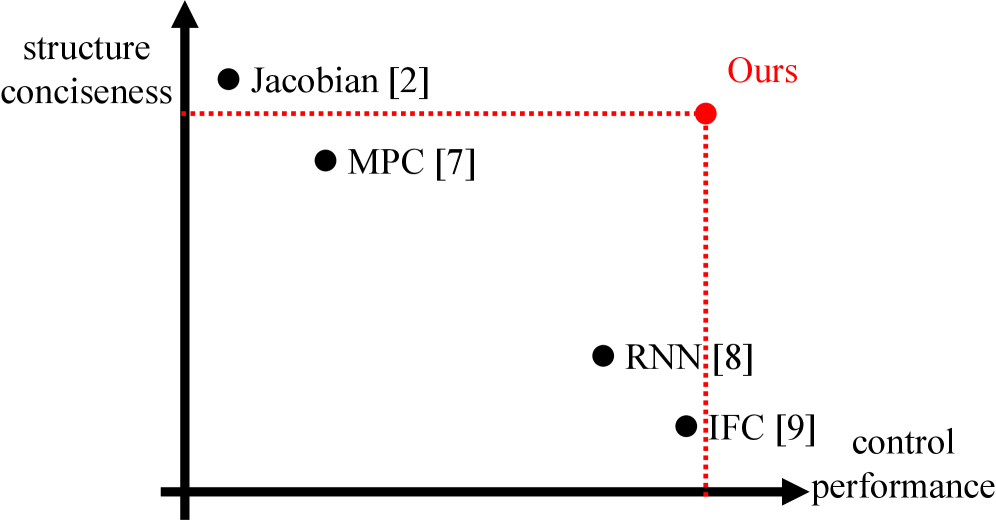
- AdapJ控制器保留雅可比控制器的简洁性,引入独立参数以增强适应性,并利用逆模型进行初始化和更新,无需构建正向模型。
- 实验表明,AdapJ在仿真和真实环境中均优于其他控制器,所需训练样本更少,且能适应控制频率、材料硬度和外部干扰等变化。
📝 摘要(中文)
软体机器人运动的非线性和滞后性给控制带来了挑战。为了解决这些问题,雅可比控制器被用于以线性格式近似非线性行为。像神经网络这样精确的控制器可以处理延迟和非线性运动,但它们需要大量的数据集并且适应性较低。基于对这些控制器的新颖分析,我们提出了一种用于软体机器人的自适应扩展雅可比控制器AdapJ。该控制器保留了雅可比控制器的简洁形式,但引入了独立的参数。与神经网络类似,它的初始化和更新机制利用逆模型,而无需构建相应的正向模型。在实验中,我们首先在仿真中比较了雅可比控制器、模型预测控制器、神经网络控制器、迭代反馈控制器和AdapJ的性能。我们进一步分析了AdapJ参数如何适应物理属性的变化。然后,真实世界的实验验证了AdapJ优于神经网络控制器、模型预测控制器和迭代反馈控制器,且训练样本更少,并能稳健地适应各种条件,包括不同的控制频率、材料柔软度和外部干扰。未来的工作可能包括在线调整控制器格式以及在更多场景中验证适应性。
🔬 方法详解
问题定义:软体机器人的控制由于其固有的非线性和滞后性而变得复杂。传统的雅可比控制器虽然简单,但难以精确建模这些非线性行为。而像神经网络这样的方法虽然可以处理非线性,但需要大量的训练数据,并且在面对新的环境或机器人参数变化时,适应性较差。因此,如何在保证控制器的简洁性的同时,提高其适应性和鲁棒性,是本文要解决的核心问题。
核心思路:AdapJ的核心思路是扩展传统的雅可比控制器,使其具有更强的适应性。具体来说,AdapJ在雅可比控制器的基础上引入了独立的参数,这些参数可以根据实际情况进行调整,从而更好地拟合软体机器人的非线性行为。同时,AdapJ借鉴了神经网络的训练方法,利用逆模型进行初始化和更新,避免了构建复杂的正向模型。
技术框架:AdapJ控制器的整体框架可以分为三个主要部分:初始化、控制和更新。首先,利用逆模型对AdapJ的参数进行初始化。然后,在控制过程中,AdapJ根据当前的状态和目标,计算出控制信号,并将其发送给软体机器人。最后,根据机器人的实际运动情况,利用逆模型对AdapJ的参数进行更新,使其能够更好地适应当前的环境和机器人参数。
关键创新:AdapJ的关键创新在于其自适应的参数调整机制。与传统的雅可比控制器相比,AdapJ的参数可以根据实际情况进行调整,从而更好地拟合软体机器人的非线性行为。与神经网络相比,AdapJ的参数数量更少,训练速度更快,并且具有更好的泛化能力。此外,AdapJ利用逆模型进行初始化和更新,避免了构建复杂的正向模型,从而降低了计算复杂度。
关键设计:AdapJ的关键设计包括以下几个方面:1) 独立的参数化:AdapJ在雅可比控制器的基础上引入了独立的参数,这些参数可以根据实际情况进行调整。2) 逆模型初始化:利用逆模型对AdapJ的参数进行初始化,使其能够更好地适应软体机器人的非线性行为。3) 自适应更新:根据机器人的实际运动情况,利用逆模型对AdapJ的参数进行更新,使其能够更好地适应当前的环境和机器人参数。具体的参数设置和更新算法在论文中有详细描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,AdapJ在仿真和真实环境中均优于雅可比控制器、模型预测控制器、神经网络控制器和迭代反馈控制器。在真实环境中,AdapJ在训练样本较少的情况下,仍能达到比神经网络控制器更好的控制精度,并且能够稳健地适应不同的控制频率、材料柔软度和外部干扰。例如,在材料硬度变化的情况下,AdapJ能够自动调整参数,保持控制性能。
🎯 应用场景
AdapJ控制器在软体机器人领域具有广泛的应用前景,例如医疗康复、柔性制造、灾害救援等。它可以提高软体机器人的控制精度和鲁棒性,使其能够更好地完成各种复杂的任务。此外,AdapJ的自适应能力使其能够适应不同的环境和机器人参数,从而降低了开发和维护成本。未来,AdapJ有望成为软体机器人控制领域的重要技术。
📄 摘要(原文)
The nonlinearity and hysteresis of soft robot motions present challenges for control. To solve these issues, the Jacobian controller has been applied to approximate the nonlinear behaviors in a linear format. Accurate controllers like neural networks can handle delayed and nonlinear motions, but they require large datasets and exhibit low adaptability. Based on a novel analysis on these controllers, we propose an adaptive extended Jacobian controller, AdapJ, for soft manipulators. This controller retains the concise format of the Jacobian controller but introduces independent parameters. Similar to neural networks, its initialization and updating mechanism leverages the inverse model without building the corresponding forward model. In the experiments, we first compare the performance of the Jacobian controller, model predictive controller, neural network controller, iterative feedback controller, and AdapJ in simulation. We further analyze how AdapJ parameters adapt in response to the physical property change. Then, real-world experiments have validated that AdapJ outperforms the neural network controller, model predictive controller, and iterative feedback controller with fewer training samples and adapts robustly to varying conditions, including different control frequencies, material softness, and external disturbances. Future work may include online adjustment of the controller format and adaptability validation in more scenarios.