Accelerating Hybrid Model Predictive Control using Warm-Started Generalized Benders Decomposition
作者: Xuan Lin
分类: cs.RO, eess.SY
发布日期: 2024-06-02 (更新: 2025-12-18)
备注: Significantly revised to emphasize theoretical bounds. The heuristic Master Problem algorithm and GCS tightening experiments are preserved in v1
🔗 代码/项目: GITHUB
💡 一句话要点
提出基于暖启动广义Benders分解的混合模型预测控制算法,加速机器人控制任务。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 混合模型预测控制 广义Benders分解 暖启动 机器人控制 实时优化
📋 核心要点
- 混合模型预测控制在机器人控制中应用广泛,但其组合复杂性导致求解速度慢,难以满足实时性要求。
- 论文提出基于广义Benders分解的混合MPC算法,通过在线枚举和传递切割平面实现暖启动,加速求解过程。
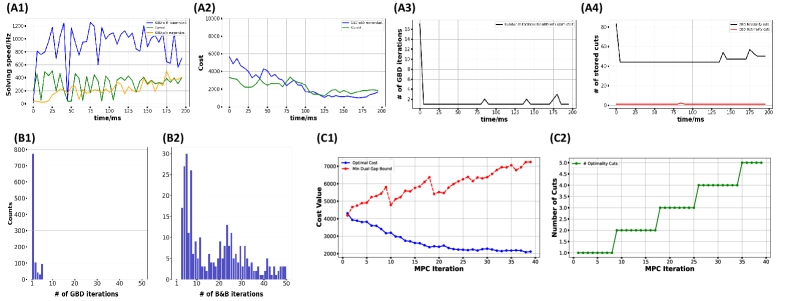
- 实验表明,该算法在多个机器人控制任务中,求解速度比Gurobi快2-3倍,且通常超过1000Hz。
📝 摘要(中文)
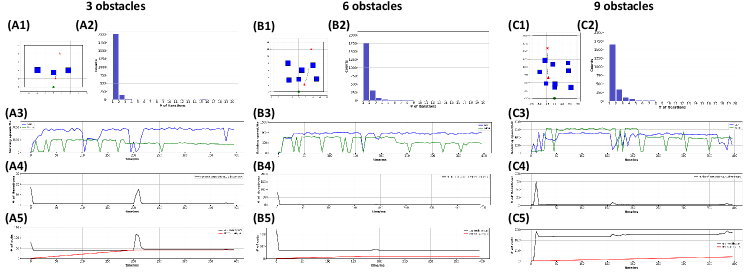
本文提出了一种基于广义Benders分解的混合模型预测控制(MPC)算法,用于解决同时包含连续和离散变量的机器人控制任务,尤其是在与环境存在接触的情况下。针对混合MPC因组合复杂性导致求解速度不足以满足实时应用的问题,该算法在线枚举并存储切割平面于有限缓冲区内,并在MPC迭代中传递这些切割平面,为新的问题实例提供暖启动,从而显著提高求解速度。通过时移和伸缩对模式序列的偏差进行建模,推导了传递的最优性切割与真实最优成本之间的对偶间隙的界限,并利用这些界限来量化Benders主问题首次求解中保证的次优水平,从而对这种暖启动性能进行了理论分析。通过控制带有软接触壁的倒立摆系统、在障碍物周围自由飞行的机器人以及在单腿站立同时用手推墙以保持平衡的人形机器人,在仿真中验证了该算法。对于我们的基准问题,该算法枚举了数十到数百个切割,同时达到了比现成的求解器Gurobi快2-3倍的速度,通常超过1000 Hz。代码可在https://github.com/XuanLin/Benders-MPC 获取。
🔬 方法详解
问题定义:论文旨在解决混合模型预测控制(Hybrid MPC)在机器人控制任务中,由于同时存在连续和离散变量而导致的计算复杂度高、求解速度慢的问题。现有的混合MPC方法难以满足实时性要求,尤其是在需要与环境进行接触的复杂任务中。
核心思路:论文的核心思路是利用广义Benders分解(Generalized Benders Decomposition, GBD)将混合MPC问题分解为更容易求解的子问题和主问题,并通过暖启动(Warm-Start)策略加速求解过程。通过在迭代中传递切割平面,为后续问题提供更好的初始解,从而减少求解时间。
技术框架:该算法的整体框架如下: 1. 问题分解:使用广义Benders分解将混合MPC问题分解为混合整数主问题(Master Problem)和连续子问题(Subproblem)。 2. 在线切割平面枚举与存储:在线枚举切割平面,并将其存储在有限大小的缓冲区中。 3. 暖启动:在MPC迭代中,将缓冲区中的切割平面传递给新的主问题,作为暖启动信息。 4. 求解器:使用求解器(如Gurobi)求解主问题和子问题。 5. 性能分析:通过时移和伸缩对模式序列的偏差进行建模,推导对偶间隙的界限,并量化次优水平。
关键创新:该论文的关键创新在于将暖启动策略与广义Benders分解相结合,并提出了在线枚举和传递切割平面的方法。与传统的混合MPC方法相比,该方法能够显著提高求解速度,使其更适用于实时机器人控制任务。此外,论文还对暖启动的性能进行了理论分析,提供了对偶间隙的界限。
关键设计: 1. 切割平面缓冲区:设计了一个有限大小的缓冲区来存储切割平面,需要考虑缓冲区的容量和切割平面的选择策略。 2. 暖启动策略:设计了如何将切割平面从前一个MPC迭代传递到当前迭代的策略,需要考虑模式序列的偏差。 3. 对偶间隙界限:推导了传递的最优性切割与真实最优成本之间的对偶间隙的界限,用于量化次优水平。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该算法在倒立摆、自由飞行机器人和人形机器人等多个仿真环境中均表现出色。与Gurobi求解器相比,该算法的求解速度提高了2-3倍,并且通常超过1000 Hz。此外,该算法仅需枚举数十到数百个切割平面,即可达到较高的求解速度,验证了暖启动策略的有效性。
🎯 应用场景
该研究成果可应用于各种需要实时控制的机器人系统,尤其是在与环境存在复杂交互的场景中,例如:人形机器人操作、移动机器人导航、以及自动化装配等。通过提高混合MPC的求解速度,可以实现更快速、更稳定的机器人控制,从而提升生产效率和安全性。未来,该方法有望扩展到更复杂的混合动力系统和多智能体系统。
📄 摘要(原文)
Hybrid model predictive control with both continuous and discrete variables is widely applicable to robotic control tasks, especially those involving contacts with the environment. Due to combinatorial complexity, the solving speed of hybrid MPC can be insufficient for real-time applications. In this paper, we propose a hybrid MPC algorithm based on Generalized Benders Decomposition. The algorithm enumerates and stores cutting planes online inside a finite buffer and transfers them across MPC iterations to provide warm-starts for new problem instances, significantly enhancing solving speed. We theoretically analyze this warm-starting performance by modeling the deviation of mode sequences through temporal shifting and stretching, deriving bounds on the dual gap between transferred optimality cuts and the true optimal costs, and utilizing these bounds to quantify the level of suboptimality guaranteed in the first solve of the Benders Master Problem. Our algorithm is validated in simulation through controlling a cart-pole system with soft contact walls, a free-flying robot navigating around obstacles, and a humanoid robot standing on one leg while pushing against walls with its hands for balance. For our benchmark problems, the algorithm enumerates cuts on the order of only tens to hundreds while reaching speeds 2-3 times faster than the off-the-shelf solver Gurobi, oftentimes exceeding 1000 Hz. The code is available at https://github.com/XuanLin/Benders-MPC.