Unsupervised Neural Motion Retargeting for Humanoid Teleoperation
作者: Satoshi Yagi, Mitsunori Tada, Eiji Uchibe, Suguru Kanoga, Takamitsu Matsubara, Jun Morimoto
分类: cs.RO
发布日期: 2024-06-02
💡 一句话要点
提出基于GAN的无监督神经运动重定向方法,用于人型机器人遥操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人型机器人 遥操作 运动重定向 生成对抗网络 无监督学习
📋 核心要点
- 传统人型机器人遥操作依赖成对数据集,构建人类与机器人运动学关系,过程复杂且成本高昂。
- 论文提出基于GAN的无监督运动重定向方法,无需成对数据,简化了人型机器人遥操作系统的构建。
- 实验验证了该方法在多种运动重定向任务中的有效性,并在人机交互遥操作中取得了与传统方法相当的性能。
📝 摘要(中文)
本研究提出了一种基于GAN的在线运动重定向方法,用于人到人型机器人的遥操作。该方法无需构建成对数据集来识别人类和人型机器人运动学之间的关系。因此,我们提出的遥操作系统有望降低人型机器人控制器的复杂性和设置要求,从而促进为没有机器人知识的用户开发更易于访问和直观的遥操作系统。实验证明了该方法在将一系列上半身人体运动重定向到人型机器人方面的有效性,包括身体刺拳运动和篮球投篮运动。此外,通过测量人类和重定向的人型机器人运动之间的末端执行器位置误差,评估了人机回路遥操作性能。结果表明,该误差与需要成对运动数据集的传统运动重定向方法相当。最后,进行了一个盒子拾取和放置任务,以证明所开发的人型机器人遥操作系统的可用性。
🔬 方法详解
问题定义:论文旨在解决人型机器人遥操作中,传统方法依赖大量成对的人类和机器人运动数据进行训练,导致系统搭建复杂、成本高昂的问题。现有方法难以适应不同体型、运动习惯的人类操作者,泛化能力受限。
核心思路:论文的核心思路是利用生成对抗网络(GAN)学习人类运动和机器人运动之间的映射关系,通过对抗训练,使得生成器能够将人类运动转化为机器人可执行的运动,而无需显式的成对数据。这样可以降低数据收集和标注的成本,并提高系统的灵活性和适应性。
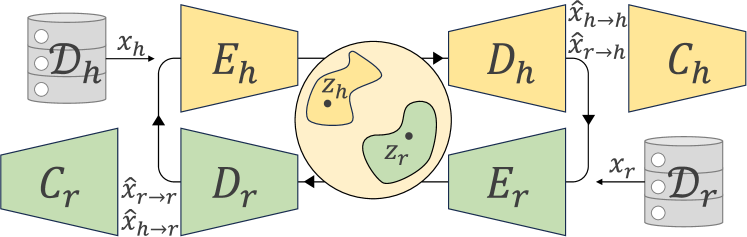
技术框架:整体框架包含一个生成器和一个判别器。生成器负责将人类的运动姿态作为输入,生成对应的机器人运动姿态。判别器则负责区分生成的机器人运动姿态和真实的机器人运动姿态。通过对抗训练,生成器不断优化其生成能力,使得生成的机器人运动姿态越来越接近真实机器人运动姿态,从而实现运动重定向。
关键创新:该方法最重要的创新点在于其无监督的学习方式。传统方法需要大量的成对数据进行训练,而该方法只需要人类和机器人各自的运动数据,无需建立一一对应的关系。这大大降低了数据收集和标注的成本,并提高了系统的泛化能力。
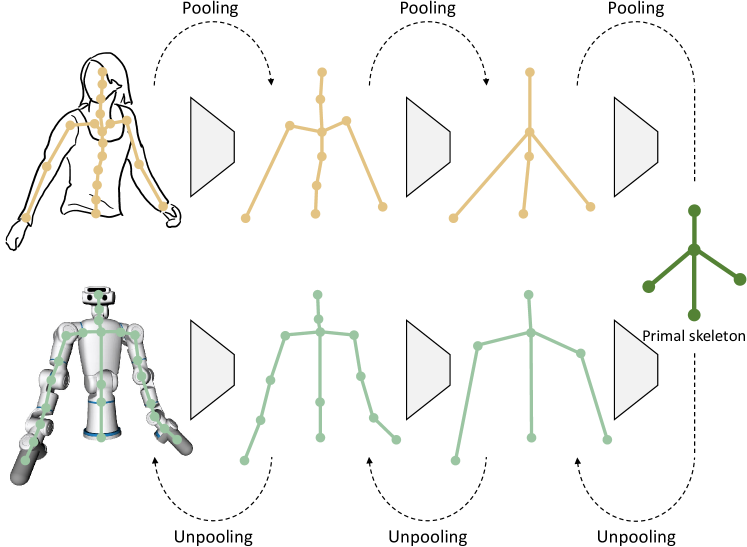
关键设计:论文使用了基于神经网络的生成器和判别器。生成器采用编码器-解码器结构,将人类运动姿态编码成潜在向量,然后解码成机器人运动姿态。判别器则是一个分类器,用于区分生成的机器人运动姿态和真实的机器人运动姿态。损失函数包括对抗损失和循环一致性损失,以保证生成的机器人运动姿态既逼真又与人类运动姿态保持一致。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在重定向上半身运动(如刺拳和投篮)时表现良好。人机回路遥操作的末端执行器位置误差与需要成对数据集的传统方法相当,证明了该方法在实际应用中的可行性。此外,通过盒子拾取和放置任务验证了所开发系统的可用性。
🎯 应用场景
该研究成果可应用于人型机器人的远程控制、康复训练、虚拟现实等领域。通过简化人机交互方式,降低操作门槛,使得非专业人员也能轻松操控人型机器人完成复杂任务,例如远程医疗、危险环境作业等。未来可进一步扩展到不同类型的机器人,实现更广泛的应用。
📄 摘要(原文)
This study proposes an approach to human-to-humanoid teleoperation using GAN-based online motion retargeting, which obviates the need for the construction of pairwise datasets to identify the relationship between the human and the humanoid kinematics. Consequently, it can be anticipated that our proposed teleoperation system will reduce the complexity and setup requirements typically associated with humanoid controllers, thereby facilitating the development of more accessible and intuitive teleoperation systems for users without robotics knowledge. The experiments demonstrated the efficacy of the proposed method in retargeting a range of upper-body human motions to humanoid, including a body jab motion and a basketball shoot motion. Moreover, the human-in-the-loop teleoperation performance was evaluated by measuring the end-effector position errors between the human and the retargeted humanoid motions. The results demonstrated that the error was comparable to those of conventional motion retargeting methods that require pairwise motion datasets. Finally, a box pick-and-place task was conducted to demonstrate the usability of the developed humanoid teleoperation system.