Predicting Long-Term Human Behaviors in Discrete Representations via Physics-Guided Diffusion
作者: Zhitian Zhang, Anjian Li, Angelica Lim, Mo Chen
分类: cs.RO
发布日期: 2024-05-29
💡 一句话要点
提出基于物理引导扩散模型的长时程人类行为预测框架
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱四:生成式动作 (Generative Motion) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 长时程轨迹预测 扩散模型 物理引导 VQ-VAE 行为预测 机器人导航 可达性分析
📋 核心要点
- 现有方法在长时程人类轨迹预测中表现不佳,无法有效捕捉人类行为的复杂性和不确定性。
- 该论文提出了一种基于物理引导扩散模型的框架,利用可达性分析约束潜在动作,生成更符合物理规律的预测。
- 实验结果表明,该框架在长时程人类轨迹预测任务上优于现有方法,尤其是在SFU-Store-Nav和JRDB数据集上。
📝 摘要(中文)
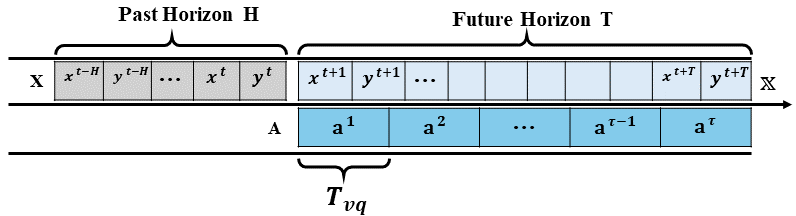
长时程人类轨迹预测是机器人和自主系统中的一项具有挑战性但至关重要的任务。以往研究仅使用单模态特征预测准确的短时程人类轨迹,但在长时程预测中往往失败。强化学习为学习人类长期行为提供了一个很好的解决方案,但可能面临数据效率和优化方面的挑战。本文提出了一个长时程人类轨迹预测框架,该框架利用引导扩散模型在高层潜在动作空间中生成多样化的长期人类行为。该潜在动作空间通过分层动作量化方案获得,该方案使用 VQ-VAE 来离散化连续轨迹和可用的上下文信息。潜在动作由我们的引导扩散模型预测,该模型在测试时使用物理启发式引导来约束生成的多模态动作分布。具体来说,我们在反向去噪过程中使用可达性分析来引导扩散步骤朝着物理上可行的潜在动作发展。我们在两个公开的人类轨迹预测数据集 SFU-Store-Nav 和 JRDB 上评估了我们的框架,大量的实验结果表明我们的框架在长时程人类轨迹预测方面取得了优异的性能。
🔬 方法详解
问题定义:长时程人类轨迹预测旨在预测未来较长时间内人类的运动轨迹。现有方法,特别是那些依赖于单模态特征的方法,在短时程预测中表现良好,但在长时程预测中往往失效。强化学习虽然可以用于学习长期行为,但存在数据效率低和优化困难的问题。因此,如何有效地预测长时程人类行为轨迹是一个重要的挑战。
核心思路:该论文的核心思路是利用扩散模型生成多样化的、符合物理规律的潜在动作序列,从而预测长时程人类轨迹。通过将连续轨迹离散化为高层潜在动作,并利用物理引导约束扩散过程,可以生成更合理、更可信的预测结果。
技术框架:该框架主要包含以下几个模块:1) 使用 VQ-VAE 进行分层动作量化,将连续轨迹离散化为潜在动作空间;2) 使用引导扩散模型预测潜在动作序列;3) 在扩散模型的反向去噪过程中,使用可达性分析进行物理引导,约束生成的动作分布。整体流程是,首先将输入轨迹编码为潜在动作,然后使用扩散模型预测未来的潜在动作序列,最后将潜在动作解码为预测轨迹。
关键创新:该论文的关键创新在于将物理引导融入到扩散模型的反向去噪过程中。通过使用可达性分析,可以评估潜在动作的物理可行性,并引导扩散过程朝着更合理的动作方向发展。这种物理引导机制可以有效地约束生成的多模态动作分布,提高预测的准确性和可信度。
关键设计:VQ-VAE 的具体结构和训练方式,扩散模型的噪声 schedule 和采样策略,以及可达性分析的具体实现方式(例如,如何定义可达性区域,如何计算可达性概率)等细节在论文中应该有详细描述。损失函数可能包括 VQ-VAE 的重构损失、扩散模型的负对数似然损失,以及可能存在的物理约束相关的损失项。
🖼️ 关键图片


📊 实验亮点
该框架在 SFU-Store-Nav 和 JRDB 两个公开数据集上进行了评估,实验结果表明,该框架在长时程人类轨迹预测方面取得了优异的性能。具体的性能提升数据需要在论文中查找,例如与其他基线方法相比,在预测精度、召回率或 F1 值等方面取得了显著提升。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、智能监控等领域。例如,在机器人导航中,预测行人的长期轨迹可以帮助机器人更好地规划路径,避免碰撞。在自动驾驶中,准确预测其他车辆和行人的行为对于安全驾驶至关重要。在智能监控中,可以用于预测潜在的危险行为,提高安全性。
📄 摘要(原文)
Long-term human trajectory prediction is a challenging yet critical task in robotics and autonomous systems. Prior work that studied how to predict accurate short-term human trajectories with only unimodal features often failed in long-term prediction. Reinforcement learning provides a good solution for learning human long-term behaviors but can suffer from challenges in data efficiency and optimization. In this work, we propose a long-term human trajectory forecasting framework that leverages a guided diffusion model to generate diverse long-term human behaviors in a high-level latent action space, obtained via a hierarchical action quantization scheme using a VQ-VAE to discretize continuous trajectories and the available context. The latent actions are predicted by our guided diffusion model, which uses physics-inspired guidance at test time to constrain generated multimodal action distributions. Specifically, we use reachability analysis during the reverse denoising process to guide the diffusion steps toward physically feasible latent actions. We evaluate our framework on two publicly available human trajectory forecasting datasets: SFU-Store-Nav and JRDB, and extensive experimental results show that our framework achieves superior performance in long-term human trajectory forecasting.