Multi-objective Cross-task Learning via Goal-conditioned GPT-based Decision Transformers for Surgical Robot Task Automation
作者: Jiawei Fu, Yonghao Long, Kai Chen, Wang Wei, Qi Dou
分类: cs.RO
发布日期: 2024-05-29
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于目标条件GPT决策Transformer的多目标跨任务学习框架,用于手术机器人任务自动化。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 手术机器人 任务自动化 决策Transformer GPT 跨任务学习 目标条件学习 序列决策 机器人学习
📋 核心要点
- 现有方法在长程目标条件任务中面临挑战,因为其复杂的组合结构需要对一系列子步骤进行决策,并理解目标达成任务的内在动态。
- 本文提出了一种基于目标条件决策Transformer的框架,利用GPT架构的推理能力,通过目标感知的未来指示器增强时间推理。
- 通过在SurRoL模拟器上对10个任务进行实验,证明了该方法相对于现有方法的优越性能和任务通用性,并验证了其在dVRK上的可行性。
📝 摘要(中文)
本文提出了一种新的基于学习的框架,利用GPT架构强大的推理能力来实现手术机器人任务的自动化。该方法的关键在于开发了一种目标条件决策Transformer,通过目标感知的未来指示器来实现序列表示,从而增强时间推理能力。此外,为了利用操作中固有的动力学的一般理解,使模型的推理能力与任务无关,还设计了一种跨任务预训练范式,该范式使用与来自不同任务的数据相关的多个训练目标。在手术机器人学习模拟器SurRoL上进行了10项任务的广泛实验。结果表明,与现有方法相比,该方法取得了有希望的性能和任务通用性。学习到的轨迹可以部署在达芬奇研究工具包(dVRK)上,以验证其在真实手术机器人环境中的实用性。
🔬 方法详解
问题定义:手术机器人任务自动化旨在提高手术效率和质量。现有基于学习的方法在处理长程、目标条件任务时面临挑战,因为这些任务通常具有复杂的组合结构,需要模型能够进行序列决策,并理解任务的内在动态。现有方法难以有效地进行时间推理和泛化到不同任务。
核心思路:本文的核心思路是利用GPT架构强大的推理能力,并结合目标条件学习,来解决手术机器人任务自动化中的长程依赖和任务泛化问题。通过将任务建模为序列决策问题,并使用Transformer架构进行学习,模型可以更好地理解任务的内在动态,并做出更合理的决策。
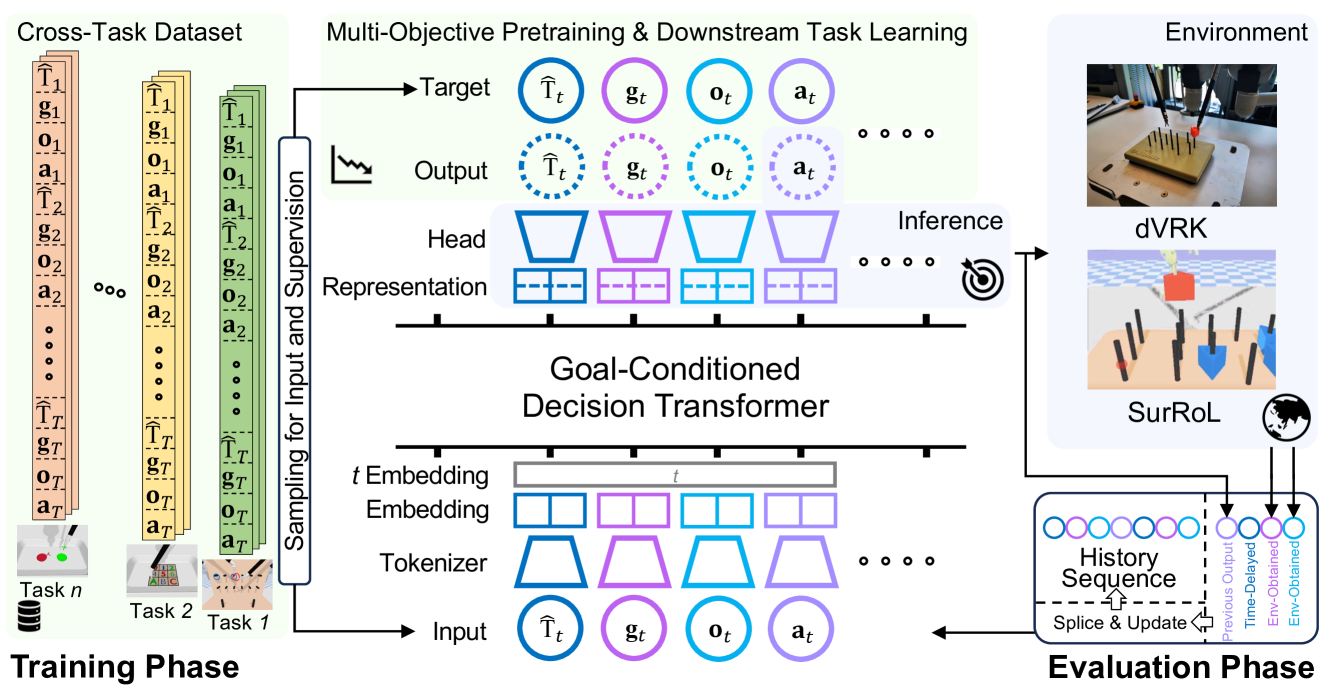
技术框架:该框架主要包含两个阶段:跨任务预训练和目标条件决策。在跨任务预训练阶段,模型使用来自多个不同任务的数据进行训练,以学习通用的操作动力学知识。在目标条件决策阶段,模型接收当前状态和目标作为输入,并输出一系列动作,以达到目标。该框架使用目标条件决策Transformer来实现序列表示,并通过目标感知的未来指示器来增强时间推理能力。
关键创新:该方法最重要的创新点在于将GPT架构应用于手术机器人任务自动化,并提出了目标条件决策Transformer。通过利用GPT架构强大的序列建模能力,模型可以更好地理解任务的内在动态,并做出更合理的决策。此外,跨任务预训练范式使得模型能够学习通用的操作动力学知识,从而提高模型的泛化能力。
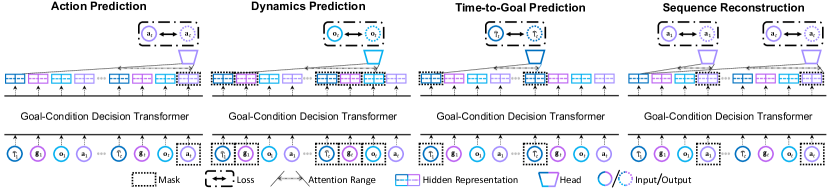
关键设计:目标条件决策Transformer的关键设计包括:使用Transformer架构进行序列建模;使用目标感知的未来指示器来增强时间推理能力;使用跨任务预训练范式来学习通用的操作动力学知识。具体的损失函数包括模仿学习损失和目标达成损失。网络结构采用标准的Transformer架构,并根据任务需求进行调整。
🖼️ 关键图片

📊 实验亮点
在SurRoL模拟器上进行的实验表明,该方法在10个不同的手术机器人任务上取得了优异的性能,显著优于现有的方法。此外,该方法学习到的轨迹可以成功部署在达芬奇研究工具包(dVRK)上,验证了其在真实手术机器人环境中的实用性。具体性能数据和提升幅度在论文中进行了详细展示。
🎯 应用场景
该研究成果可应用于多种手术机器人任务的自动化,例如缝合、切割、打结等。通过提高手术机器人的自主性和智能化水平,可以减轻医生的负担,提高手术效率和质量,并降低手术风险。此外,该方法还可以推广到其他需要长程决策和任务泛化的机器人应用领域,例如自动驾驶、物流等。
📄 摘要(原文)
Surgical robot task automation has been a promising research topic for improving surgical efficiency and quality. Learning-based methods have been recognized as an interesting paradigm and been increasingly investigated. However, existing approaches encounter difficulties in long-horizon goal-conditioned tasks due to the intricate compositional structure, which requires decision-making for a sequence of sub-steps and understanding of inherent dynamics of goal-reaching tasks. In this paper, we propose a new learning-based framework by leveraging the strong reasoning capability of the GPT-based architecture to automate surgical robotic tasks. The key to our approach is developing a goal-conditioned decision transformer to achieve sequential representations with goal-aware future indicators in order to enhance temporal reasoning. Moreover, considering to exploit a general understanding of dynamics inherent in manipulations, thus making the model's reasoning ability to be task-agnostic, we also design a cross-task pretraining paradigm that uses multiple training objectives associated with data from diverse tasks. We have conducted extensive experiments on 10 tasks using the surgical robot learning simulator SurRoL~\cite{long2023human}. The results show that our new approach achieves promising performance and task versatility compared to existing methods. The learned trajectories can be deployed on the da Vinci Research Kit (dVRK) for validating its practicality in real surgical robot settings. Our project website is at: https://med-air.github.io/SurRoL.