GroundGrid:LiDAR Point Cloud Ground Segmentation and Terrain Estimation
作者: Nicolai Steinke, Daniel Göhring, Raùl Rojas
分类: cs.RO, cs.CV
发布日期: 2024-05-24
备注: This letter has been accepted for publication in IEEE Robotics and Automation Letters
期刊: IEEE Robotics and Automation Letters, vol. 9, no. 1, pp. 420-426, Jan. 2024
🔗 代码/项目: GITHUB
💡 一句话要点
GroundGrid:基于2D高程图的激光雷达点云地面分割与地形估计
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 激光雷达 点云分割 地面分割 地形估计 自动驾驶
📋 核心要点
- 现有激光雷达点云地面分割方法在复杂地形或噪声环境下表现不佳,影响后续感知任务的准确性。
- GroundGrid利用2D高程图进行地形估计和地面分割,有效降低了计算复杂度,并提升了分割精度。
- 实验表明,GroundGrid在SemanticKITTI数据集上取得了优异的分割效果,并具有较高的运行效率。
📝 摘要(中文)
精确的点云地面分割是自动驾驶车辆中激光雷达传感器感知任务的关键前提。特别是,从点云中聚类和提取对象通常依赖于对地面点的准确移除。对周围地形的正确估计对于表面的可驾驶性、路径规划和障碍物预测等方面非常重要。在本文中,我们提出了我们的系统GroundGrid,它依赖于2D高程图来解决地形估计和点云地面分割问题。我们评估了GroundGrid的地面分割和地形估计性能,并使用SemanticKITTI数据集和一种依赖于机载激光雷达扫描的新型评估方法,将其与其他最先进的方法进行了比较。结果表明,GroundGrid能够以94.78%的平均IoU优于其他最先进的系统,同时保持171Hz的高运行速度。
🔬 方法详解
问题定义:论文旨在解决自动驾驶场景下激光雷达点云的地面分割和地形估计问题。现有方法在处理复杂地形、非结构化环境或存在噪声的点云数据时,分割精度和效率会显著下降,从而影响后续的障碍物检测、路径规划等任务。
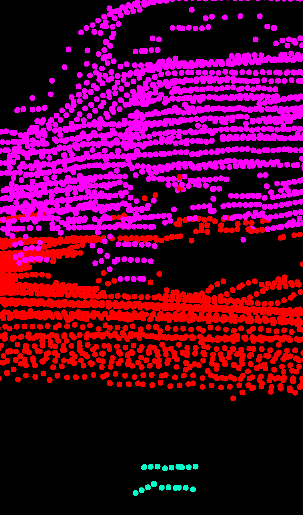
核心思路:论文的核心思路是将三维点云数据转换为二维高程图,在高程图上进行地面分割和地形估计。这种方法降低了计算复杂度,并且能够更好地利用图像处理技术来提取地形特征。通过对高程图进行分析,可以有效地识别和分割地面点,并估计出周围地形的坡度、高度等信息。
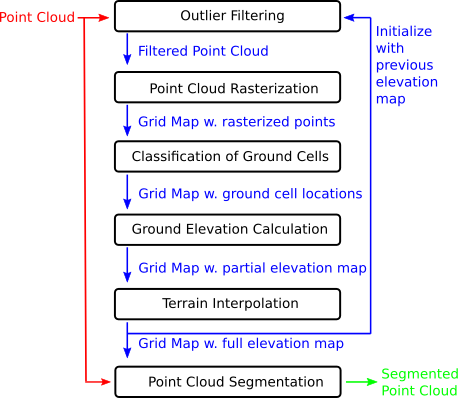
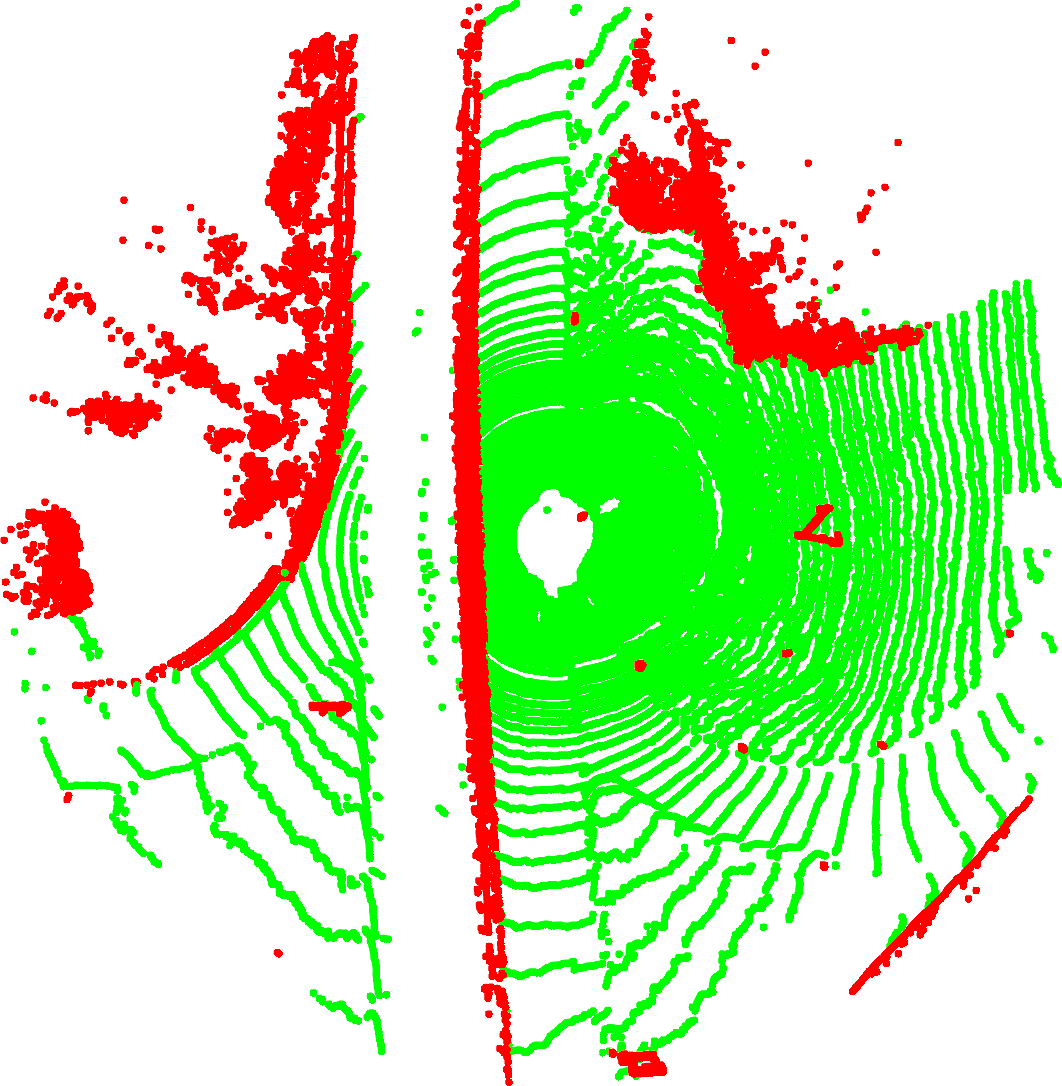
技术框架:GroundGrid系统的整体框架主要包括以下几个阶段:1) 点云预处理:对原始激光雷达点云进行滤波、降噪等处理。2) 高程图生成:将预处理后的点云投影到二维平面上,生成高程图。3) 地面分割:在高程图上使用图像分割算法(具体算法未知)将地面点与其他点区分开。4) 地形估计:根据分割结果,估计地面的坡度、高度等信息。5) 后处理:对分割结果进行优化,例如去除孤立的非地面点。
关键创新:该论文的关键创新在于将点云地面分割问题转化为二维高程图上的图像分割问题。与直接在三维点云上进行处理的方法相比,这种方法显著降低了计算复杂度,提高了处理速度。此外,利用高程图可以更好地提取地形特征,从而提高分割精度。
关键设计:论文中关于高程图的生成方式、图像分割算法的选择以及地形估计的具体方法等关键设计细节未知。论文中提到系统运行速度高达171Hz,推测其图像分割算法可能采用了轻量级的快速分割方法。具体的参数设置、损失函数和网络结构等细节需要在阅读源代码后才能确定。
🖼️ 关键图片
📊 实验亮点
GroundGrid在SemanticKITTI数据集上取得了94.78%的平均IoU,优于其他state-of-the-art方法。同时,该系统保持了171Hz的高运行速度,表明其具有很高的实用价值。该论文还提出了一种基于机载激光雷达扫描的新型评估方法,为地面分割算法的评估提供了新的思路。
🎯 应用场景
GroundGrid可广泛应用于自动驾驶、机器人导航、三维地图构建等领域。精确的地面分割和地形估计是这些应用场景中的关键环节,能够提高系统的环境感知能力和安全性。该研究成果有助于提升自动驾驶车辆在复杂环境下的适应性和可靠性,并为机器人自主导航提供更准确的环境信息。
📄 摘要(原文)
The precise point cloud ground segmentation is a crucial prerequisite of virtually all perception tasks for LiDAR sensors in autonomous vehicles. Especially the clustering and extraction of objects from a point cloud usually relies on an accurate removal of ground points. The correct estimation of the surrounding terrain is important for aspects of the drivability of a surface, path planning, and obstacle prediction. In this article, we propose our system GroundGrid which relies on 2D elevation maps to solve the terrain estimation and point cloud ground segmentation problems. We evaluate the ground segmentation and terrain estimation performance of GroundGrid and compare it to other state-of-the-art methods using the SemanticKITTI dataset and a novel evaluation method relying on airborne LiDAR scanning. The results show that GroundGrid is capable of outperforming other state-of-the-art systems with an average IoU of 94.78% while maintaining a high run-time performance of 171Hz. The source code is available at https://github.com/dcmlr/groundgrid